BRTIRPH1210A چھ محور والا روبوٹ ہے جسے BORUNTE نے ویلڈنگ، ڈیبرنگ اور گرائنڈنگ ایپلی کیشن انڈسٹریز کے لیے تیار کیا ہے۔ یہ کمپیکٹ شکل میں، سائز میں چھوٹا، وزن میں ہلکا، زیادہ سے زیادہ 10 کلو گرام اور بازو کا دورانیہ 1225 ملی میٹر ہے۔ اس کی کلائی کھوکھلی ساخت کو اپناتی ہے، جو وائرنگ کو زیادہ آسان اور حرکت کو زیادہ لچکدار بناتی ہے۔ پہلا، دوسرا اور تیسرا جوڑ سبھی اعلیٰ درستگی سے لیس ہیں، اور چوتھا، پانچواں اور چھٹا جوڑ سبھی اعلیٰ درستگی والے گیئر ڈھانچے سے لیس ہیں۔ تیز رفتار مشترکہ رفتار لچکدار آپریشن کو قابل بناتی ہے۔ تحفظ کا درجہ IP54 تک پہنچ جاتا ہے۔ ڈسٹ پروف اور واٹر پروف۔ دوبارہ پوزیشننگ کی درستگی ± 0.07 ملی میٹر ہے۔

درست پوزیشننگ

تیز

طویل سروس کی زندگی

کم ناکامی کی شرح

مزدوری کو کم کریں۔

ٹیلی کمیونیکیشن
| آئٹم | رینج | زیادہ سے زیادہ رفتار | ||
| بازو | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| کلائی | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| بازو کی لمبائی (ملی میٹر) | لوڈنگ کی صلاحیت (کلوگرام) | بار بار پوزیشننگ کی درستگی (ملی میٹر) | پاور سورس (kVA) | وزن (کلوگرام) |
| 1225 | 10 | ±0.07 | 4.30 | 155  1. پیشہ ورانہ پالش کرنے والے روبوٹک بازو کی خریداری کے کیا فوائد ہیں؟ BORUNTE پالش کرنے والے صنعتی روبوٹ پیداوار کی کارکردگی کو بہتر بنا سکتے ہیں، مصنوعات کے معیار کو بہتر بنا سکتے ہیں، مزدوری کے اخراجات اور انسانی غلطی کے خطرات کو کم کر سکتے ہیں، یہ کام کرنے کا محفوظ ماحول فراہم کرنے کے لیے اعلی درجہ حرارت، نقصان دہ گیس اور دیگر ماحول میں کام کر سکتا ہے۔ 2. آپ کی ضروریات کے مطابق پالش کرنے والے صنعتی روبوٹ کا انتخاب کیسے کریں؟ روبوٹ کا انتخاب کرتے وقت، درج ذیل عوامل پر غور کیا جانا چاہیے: کام کا بوجھ، کام کی جگہ، درستگی کے تقاضے، کام کی رفتار، حفاظت کے تقاضے، پروگرامنگ اور آپریشنل سادگی، دیکھ بھال کے تقاضے، اور بجٹ کی رکاوٹیں۔ ساتھ ہی، مزید تفصیلی تجاویز حاصل کرنے کے لیے سپلائرز اور پیشہ ور افراد سے بھی مشاورت کی جانی چاہیے۔ پروفیشنل پالش کرنے والے روبوٹک بازو کی اہم خصوصیات: 1. درستگی اور دہرانے کی صلاحیت: پالش کرنے کے کام کے لیے عام طور پر انتہائی درست حرکت اور مسلسل آپریشن کی ضرورت ہوتی ہے۔ صنعتی روبوٹ ملی میٹر کی سطح کی درستگی کے ساتھ پوزیشن اور کنٹرول کر سکتے ہیں، ہر آپریشن میں مستقل نتائج کو یقینی بناتے ہیں۔ 2. آٹومیشن اور کارکردگی: صنعتی روبوٹ کے بنیادی مقاصد میں سے ایک پیداواری کارکردگی کو بہتر بنانا ہے۔ پالش کرنے کا عمل عام طور پر بوجھل اور وقت طلب ہوتا ہے، لیکن روبوٹ تیز رفتار اور مستقل مزاجی سے کام انجام دے سکتے ہیں، اس طرح پروڈکشن لائن کی مجموعی کارکردگی کو بہتر بنایا جا سکتا ہے۔ 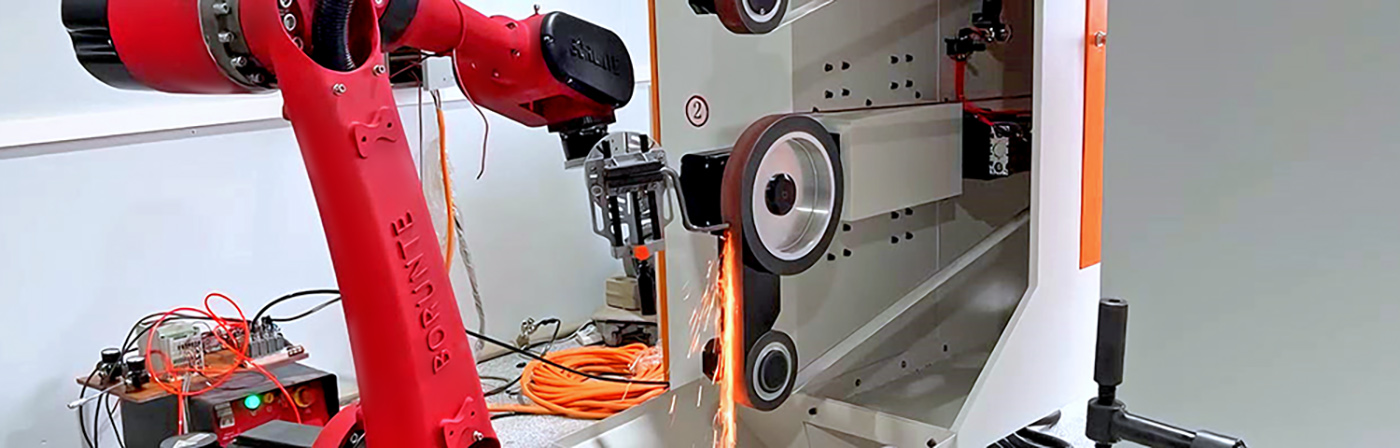  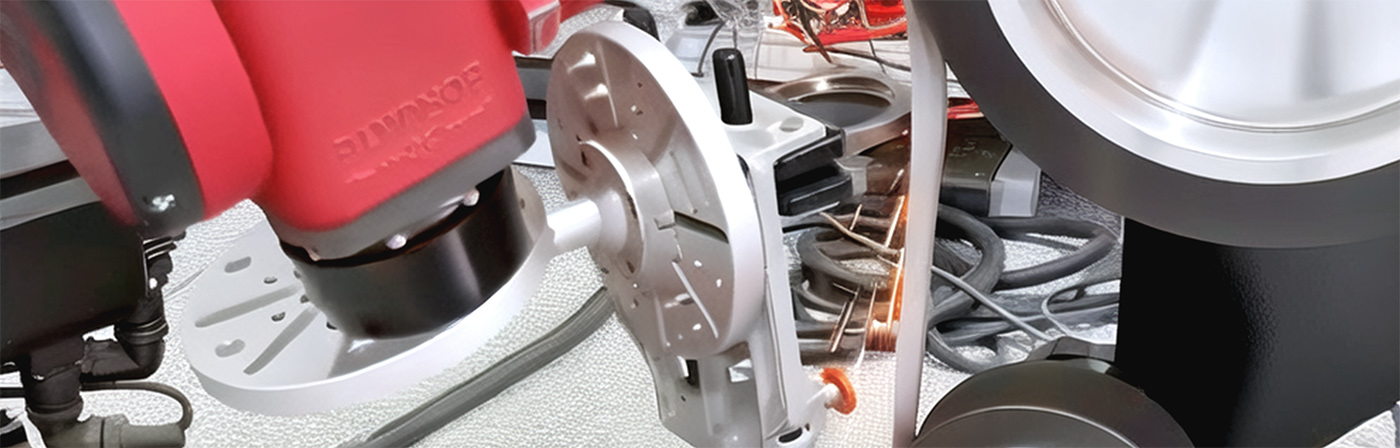 
مصنوعات کے زمرےBORUNTE اور BORUNTE انٹیگریٹرزBORUNTE ماحولیاتی نظام میں، BORUNTE روبوٹس اور ہیرا پھیری کرنے والوں کی R&D، پیداوار اور فروخت کے لیے ذمہ دار ہے۔ BORUNTE انٹیگریٹرز اپنی صنعت یا فیلڈ کے فوائد کا استعمال کرتے ہوئے ٹرمینل ایپلیکیشن ڈیزائن، انٹیگریشن، اور BORUNTE پروڈکٹس کے لیے بعد از فروخت سروس فراہم کرتے ہیں۔ BORUNTE اور BORUNTE انٹیگریٹرز اپنی متعلقہ ذمہ داریاں پوری کرتے ہیں اور ایک دوسرے سے آزاد ہیں، BORUNTE کے روشن مستقبل کو فروغ دینے کے لیے مل کر کام کرتے ہیں۔
© کاپی رائٹ - 2010-2024 : جملہ حقوق محفوظ ہیں۔سائٹ کا نقشہ - AMP موبائل نیومیٹک تیرتا ہوا نیومیٹک تکلا, سپنج سکشن کپ, نیومیٹک فلوٹنگ الیکٹرک سپنڈل, محوری قوت پوزیشن معاوضہ دینے والا, غیر مقناطیسی سپلٹر, 2D بصری نظام,
|