



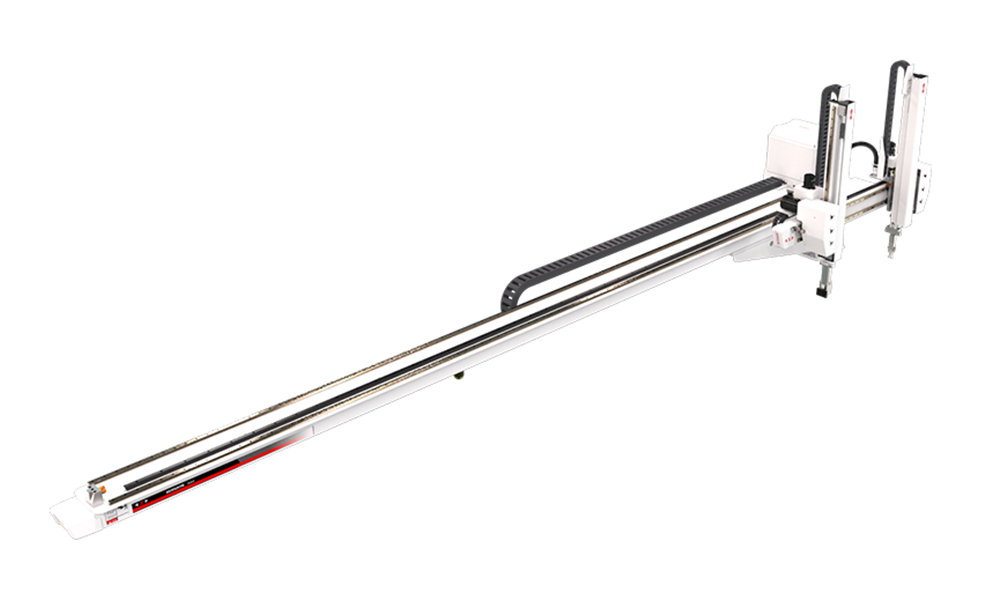
Ang BRTV13WDS5P0/F0 series ay nalalapat sa lahat ng uri ng horizontal injection machine na hanay ng 320T-700T para sa take-out na mga produkto at sprue. Ang pag-install ay naiiba sa tradisyonal na beam robot, ang mga produkto ay inilalagay sa dulo ng injection molding machine. Mayroon itong dobleng braso. Ang vertical na braso ay isang teleskopiko na yugto at ang vertical stroke ay 1300mm. Limang-axis AC servo drive. Pagkatapos ng pag-install, ang espasyo ng pag-install ng ejector ay maaaring mai-save ng 30-40%, at ang planta ay maaaring magamit nang mas ganap na nagpapahintulot sa mas mahusay na paggamit ng espasyo sa produksyon, ang produktibo ay tataas ng 20-30%, bawasan ang depektong rate, tiyakin ang kaligtasan ng mga operator, bawasan ang lakas-tao at tumpak na kontrolin ang output upang mabawasan ang basura. Five-axis driver at controller integrated system: mas kaunting mga linya ng signal, long-distance na komunikasyon, mahusay na pagpapalawak ng pagganap, malakas na anti-interference na kakayahan, mataas na katumpakan ng paulit-ulit na pagpoposisyon, maaaring sabay na kontrolin ang maraming axes, simpleng pagpapanatili ng kagamitan, at mababang rate ng pagkabigo.

Tumpak na Pagpoposisyon

Mabilis

Mahabang Buhay ng Serbisyo

Mababang Rate ng Pagkabigo

Bawasan ang Trabaho

Telekomunikasyon
| Pinagmumulan ng kuryente (kVA) | Inirerekomendang IMM (tonelada) | Traverse Driven | Modelo ng EOAT |
| 3.40 | 320T-700T | AC Servo motor | dalawang suction dalawang fixtures |
| Traverse Stroke (mm) | Crosswise Stroke (mm) | Vertical Stroke (mm) | Max.loading (kg) |
| Pahalang na arko na may kabuuang haba na mas mababa sa 6 na metro | nakabinbin | 1300 | 8 |
| Dry Take Out Time (seg) | Dry Cycle Time (seg) | Pagkonsumo ng hangin (NI/cycle) | Timbang (kg) |
| 2.3 | nakabinbin | 9 | Hindi pamantayan |
Representasyon ng modelo: W:Telescopic type. D:Big ng produkto + braso ng runner. S5: Five-axis na pinapatakbo ng AC Servo Motor ( Traverse-axis, Vertical-axis + Crosswise-axis).
Ang nabanggit na cycle time ay ang mga resulta ng internal test standard ng aming kumpanya. Sa aktwal na proseso ng aplikasyon ng makina, mag-iiba sila ayon sa aktwal na operasyon.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | nakabinbin | nakabinbin | nakabinbin | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | nakabinbin | nakabinbin | 253.5 | 399 | nakabinbin | 549 | nakabinbin |
| Q | |||||||
| 1300 | |||||||
Walang karagdagang abiso kung ang detalye at hitsura ay binago dahil sa pagpapabuti at iba pang mga dahilan. Salamat sa iyong pag-unawa.

1. Paglipat ng Estado
May tatlong katayuan ang plastic injection molding manipulator arm's teaching pendant: Manual, Stop, at Auto. [Manual]: Upang makapasok sa Manual mode, ilipat ang switch ng estado sa kaliwa. [Stop]: Upang makapasok sa Stop state, ilipat ang state switch sa gitna. Maaaring itakda ang mga parameter sa yugtong ito. [Auto]: Upang ipasok ang Auto state, ilipat ang state switch sa gitna. Ang mga awtomatiko at kaukulang setting ay maaaring gawin sa ganitong kondisyon.
2. Mga Pindutan ng Pag-andar
Button ng [Start]:
Function 1: Sa Auto mode, pindutin ang "Start" para awtomatikong simulan ang manipulator.
Function 2: Sa Stop state, pindutin ang "Origin" at pagkatapos ay "Start" para ibalik ang manipulator sa pinanggalingan.
Function 3: Sa Stop state, pindutin ang "HP" at pagkatapos ay "Start" para i-reset ang pinanggalingan ng manipulator.
Button ng [Stop]:
Function 1: Sa Auto mode, pindutin ang "Stop" at hihinto ang application kapag natapos na ang module. Function 2: Kapag may naganap na alerto, i-tap ang "Stop" sa Auto mode para burahin ang nalutas na display ng alarm.
Button ng [Origin]: Naaangkop lamang ito sa mga aksyon sa pag-uwi. Mangyaring sumangguni sa Seksyon 2.2.4 "Homing Method".
[HP] button: Pindutin ang "HP" at pagkatapos ay "Start, ang lahat ng axes ay magre-reset sa pagkakasunud-sunod ng Y1, Y2 Z, X1 at X2, Y1 at Y2 ay babalik sa 0, at Z, X1 at X2 ay babalik sa simula posisyon ng programa.
Button na [Speed Up/Down]: Ang dalawang button na ito ay maaaring gamitin para isaayos ang pandaigdigang bilis sa Manual at Auto state.
Button ng [Emergency Stop]: Sa isang emergency, ang pagpindot sa "Emergency Stop" na button ay i-off ang lahat ng axes at ipaparinig ang "Emergency Stop" na alerto. Pagkatapos alisin ang knob, pindutin ang "Stop" key upang patahimikin ang alarm.

-

Paghuhulma ng Iniksyon
Mga kategorya ng produkto
-
Limang axis mataas na katumpakan servo Manipulator BRTV0...
-

Linear na pang-industriya na paghubog ng iniksyon na robot BRTR0...
-

Mataas na bilis ng manipulator para sa iniksyon ng amag BRTR0...
-

AC servo linear industrial manipulator BRTR09WD...
-

Limang axis AC servo injection manipulator BRTR13...
-

Mabilis na Bilis ng Cartesian Robot Manipulator BRTR17WD...
BORUNTE at BORUNTE integrators
Sa BORUNTE ecosystem, ang BORUNTE ay responsable para sa R&D, produksyon, at pagbebenta ng mga robot at manipulator. Ginagamit ng mga integrator ng BORUNTE ang kanilang mga bentahe sa industriya o larangan upang magbigay ng disenyo ng terminal application, pagsasama, at serbisyo pagkatapos ng benta para sa mga produktong BORUNTE na kanilang ibinebenta. Ang mga integrator ng BORUNTE at BORUNTE ay tumutupad sa kani-kanilang mga responsibilidad at independyente sa isa't isa, nagtutulungan upang isulong ang magandang kinabukasan ng BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Mga tasa ng pagsipsip ng espongha, 2D visual system, Axial force position compensator, Pneumatic floating pneumatic spindle, Pneumatic floating electric spindle, Hindi magnetic splitter,
-

vr
-

email
-

Telepono
-

Whatsapp
-

Nangunguna