


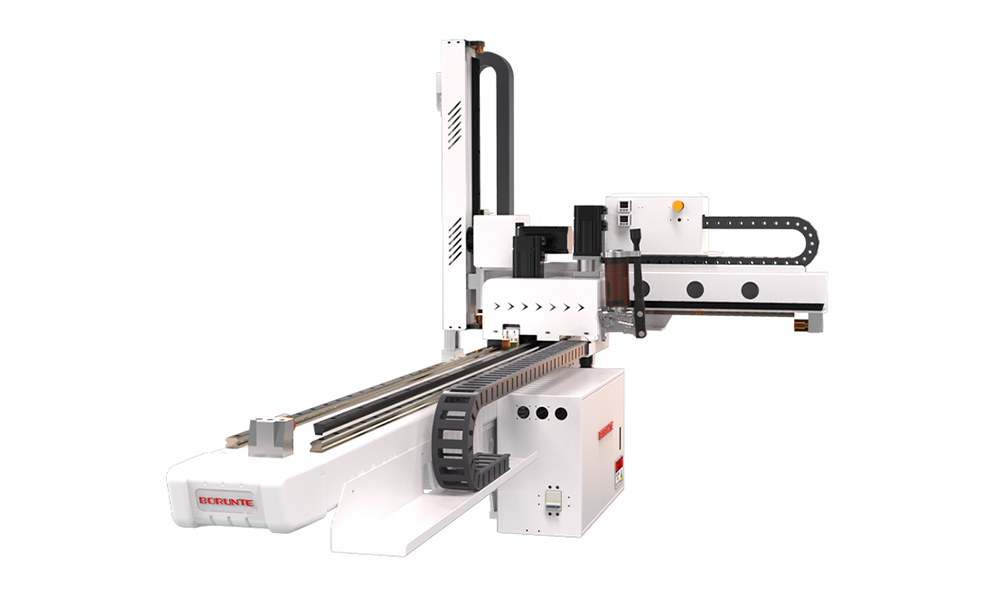

BRTNG09WSS3P / F seriýaly önümler üçin 160T-380T aralygyndaky gorizontal sanjym maşynlarynyň ähli görnüşlerine degişlidir. Dik gol, önümiň goly bilen teleskopiki görnüşdir. Üç okly AC servo sürüjisi şuňa meňzeş modellerden, takyk ýerleşişden we gysga emele getiriş siklinden wagt tygşytlaýar. Manipulýator gurlandan soň öndürijilik 10-30% ýokarlanar we önümleriň kemçilik derejesini peselder, operatorlaryň howpsuzlygyny üpjün eder, işçi güýjüni azaldar we galyndylary azaltmak üçin çykaryşa takyk gözegçilik eder. Üç okly sürüji we kontrolleýjiniň integrirlenen ulgamy: az signal çyzyklary, uzak aralyk aragatnaşygy, oňat giňeliş öndürijiligi, güýçli päsgelçiliklere garşy ukyplylygy, gaýtalanýan ýeriň ýokary takyklygy, bir wagtyň özünde birnäçe oky ýönekeý enjamlara hyzmat etmegi we pes näsazlyk derejesini dolandyryp biler.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Kuwwat çeşmesi (kVA) | Maslahat berilýän IMM (tonna) | Gezelenç | EOAT modeli |
| 3.23 | 160T-380T | AC Servo motor | iki sorujy iki armatura |
| Gezelenç urmagy (mm) | Kesgitli urgy (mm) | Dik urgy (mm) | Iň köp ýüklemek (kg) |
| 1500 | 600 | 950 | 2 |
| Gury wagt alyň (sek) | Gury sikl wagty (sek) | Howany sarp etmek (NI / sikl) | Agramy (kg) |
| 0.68 | 4.07 | 3.2 | 300 |
Modeliň görkezilmegi: W: Teleskopiki tapgyr. S: Önüm goly S3: AC Servo Motor tarapyndan dolandyrylýan üç ok (Traverse-axis 、 Dik ok + Kesişme oky)
Cycleokarda agzalan sikl wagty, kompaniýamyzyň içerki synag standartynyň netijesidir. Enjamyň hakyky ulanylyş prosesinde, hakyky işleýşine görä üýtgeýär.

| A | B | C | D | E | F | G |
| 1362 | 2275.5 | 950 | 298 | 1500 | / | 219 |
| H | I | J | K | L | M | N |
| / | / | 916 | / | 234.5 | 237.5 | 600 |
Gowulaşma we beýleki sebäpler boýunça spesifikasiýa we daşky görnüş üýtgedilen bolsa, mundan beýläk habar berilmez. Düşüneniňiz üçin sag boluň.
BRTNG09WSS3PF-iň möhüm aýratynlyklary:
1. Önümiň öň we yzky serwleriň kömegi bilen aýyrmak aňsat, öň we yzky hereket aralygy ep-esli;
2. Çalt hereket tizligine we takyk ýerleşdirilmegine eýe bolan sero motory, sero maşynyny güýçlendirýär.
3. Elektrik sazlamak mümkinçilikleri, ulanmak ýönekeý;
4. Eliň has çalt hereket etmegine sebäp bolýan goşa tizlikli mehanizmiň ulanylmagy; Pes maşynyň beýikligi pes zawod gurluşlarynda gurnamaga mümkinçilik berýär;
5. Gol takyk çyzykly süýşýän bloklardan we ýokary güýçli alýumin profillerinden durýar; minimal sürtülme, gowy berklik we uzak ömri;
6. Durnukly ýa-da ykjam galyplar bilen önümleri almak üçin ulanyp boljak 90 dereje durnukly aýlanma bilen duruş kombinasiýasy dizaýny;
7. Iki goşa gol gurluşy önümleri we suw rozetkalaryny bir wagtda gözlemäge mümkinçilik berýär we iki eli bilen özbaşdak ulanylyp bilner;
8. Galyndy siklini azaltmak üçin, enjam galybyň içinde çalt we aşak ýygnamak mehanizmini ulanýar we önümleriň we burunlaryň kem-kemden daşardan ýerleşdirilmegi, netijede has durnukly işlemegine we has ygtybarly hereket etmegine sebäp bolýar.
Manipulýatoryň her böleginiň anyk barlag işi:
1: Iki nokat kombinasiýany saklamak
A. Suw käsesini suw ýa-da ýag üçin barlaň we mümkin boldugyça gysga wagtda boşadyň.
B. Iki gezek elektrik kombinasiýasynyň basyş görkezijisiniň işleýändigini barlaň.
C. Howa kompressorynyň zeýkeş wagty
2: Jigleri we ýelmenýän berkidiji nurbatlary gözden geçiriň.
A. Gurluş birikdiriş blokyny we ýelmenýän nurbatlary barlaň.
B. Gurluş silindriniň berkidiji nurbatlarynyň gowşakdygyny ýa-da ýokdugyny barlaň.
C. Gurluşy ýelken bilen birleşdirýän nurbadyň boşdugyny ýa-da ýokdugyny barlaň.
3: Sinhronizasiýa guşagyny gözden geçiriň
A. Sinhron guşak ýüzüni we dişleriniň geýilendigini ýa-da ýokdugyny anyklaň.
B. Ulanylanda kemeriň boşdugyny kesgitläň. Ackumşak kemer dartyş enjamyny ulanyp ýene dartylmalydyr.

-

Sanjym galyplary
Önüm kategoriýalary
-

Üç okly plastmassa sanjym robot manipulýatory ...
-

Bäş ok uzyn dik dik urgy manipulýator goly ...
-

Bäş ok uly sanjym manipulýatory BR ...
-

AC servo motorly BRTN30 tarapyndan dolandyrylýan manipulýator goly ...
-

AC servo galyplaýyş sanjym manipulýatory BRTNN11W ...
-

Dört ok sero bilen dolandyrylýan sanjym manipulýatory BR ...
BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



Ok güýji pozisiýasynyň öwezini dolmak, Pnewmatik ýüzýän pnewmatik şpil, Pnewmatik ýüzýän elektrik şpil, Gubka sorujy käseler, 2D wizual ulgam, Magnit däl bölüji,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky