BRTIRSE2013A, pürküji amaly pudagy üçin BORUNTE tarapyndan işlenip düzülen alty okly robot. Ultra uzyn gol uzynlygy 2000mm we iň ýokary agramy 13 kg. Ykjam gurluşy bar, ýokary çeýe we tehnologiki taýdan ösen, pürküji senagatyna we esbaplary gaýtadan işleýän giňişlige ulanylyp bilner. Gorag derejesi IP65-e ýetýär. Toz, suw geçirmeýän. Gaýtalama ýerleşiş takyklygy ± 0,5mm.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Haryt | Aralyk | Iň ýokary tizlik | ||
| Arm | J1 | ± 162.5 ° | 101,4 ° / s | |
| J2 | ± 124 ° | 105,6 ° / s | ||
| J3 | -57 ° / + 237 ° | 130.49 ° / s | ||
| Bilek | J4 | ± 180 ° | 368,4 ° / s | |
| J5 | ± 180 ° | 415.38 ° / s | ||
| J6 | ± 360 ° | 545.45 ° / s | ||
|
| ||||
| Goluň uzynlygy (mm) | Adingüklemek ukyby (kg) | Gaýtalama ýerleşiş takyklygy (mm) | Kuwwat çeşmesi (kVA) | Agramy (kg) |
| 2000 | 13 | ± 0,5 | 6.38 | 385  Senagat sepmekde ulanylýan köp ulanylýan programmirläp bolýan senagat roboty:  Senagat pürkýän robotlar haýsy suratlary ulanyp biler? 2.Mebeliň gutarmagy: Robotlar yzygiderli we ýylmanak netijelere ýetip, mebel böleklerine boýaglary, tegmilleri, laklary we beýleki bezegleri ulanyp bilerler. 3.Elektronika örtükleri: Senagat pürküji robotlar, çyglylyga, himiki serişdelere we daşky gurşaw faktorlaryna garşy gorag teklip edip, elektron enjamlara we böleklere gorag örtüklerini ulanmak üçin ulanylýar. 4.Gural örtükleri: Enjam önümçiliginde bu robotlar sowadyjylara, peçlere, kir ýuwýan maşynlara we beýleki durmuş enjamlaryna örtük ulanyp biler. 5.Arhitektura örtükleri: Senagat pürkýän robotlar arhitektura goşundylarynda demir paneller, örtük we öňünden ýasalan elementler ýaly palta gurluşyk materiallaryna ulanylyp bilner. 6. Deňiz örtükleri: Deňiz senagatynda robotlar suwdan we poslama garşy goramak üçin gämilere we gaýyklara ýöriteleşdirilen örtükleri ulanyp bilerler.  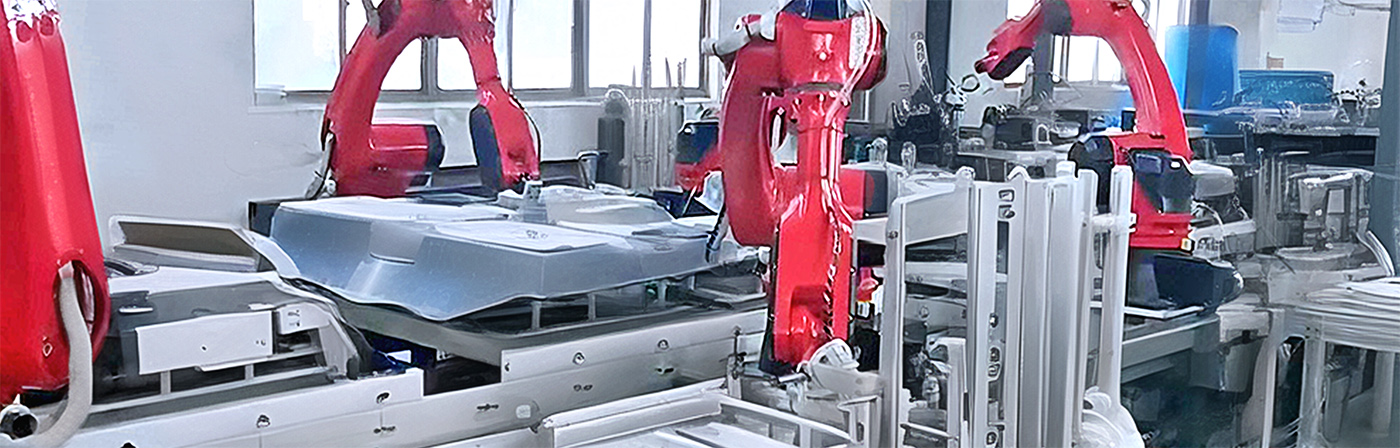 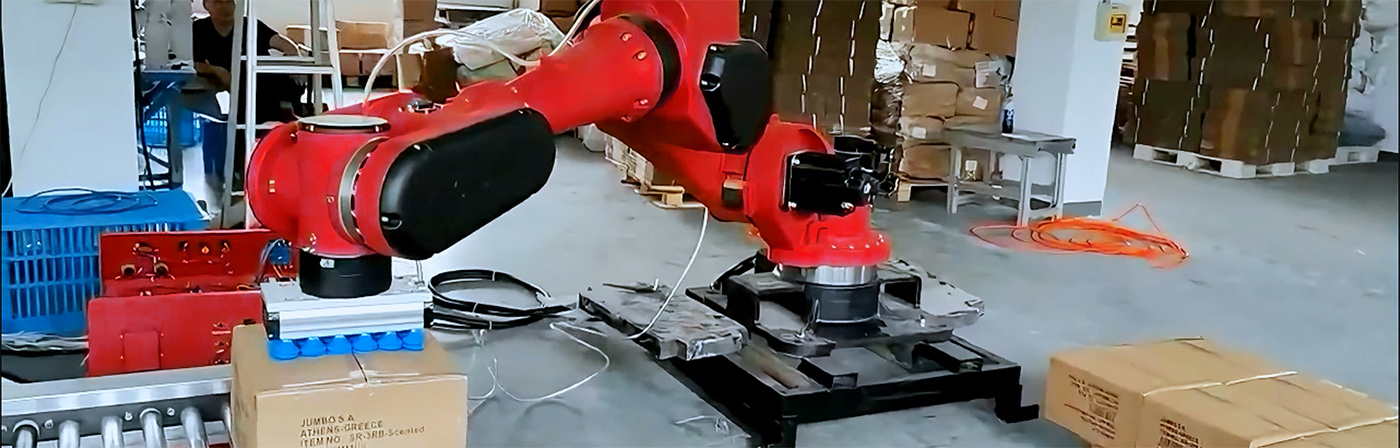 
Önüm kategoriýalaryBORUNTE we BORUNTE integratorlaryBORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
© Copyright - 2010-2024: Rightshli hukuklar goralan.Sahypanyň kartasy - AMP Mobile Magnit däl bölüji, Gubka sorujy käseler, Ok güýji pozisiýasynyň öwezini dolmak, Pnewmatik ýüzýän pnewmatik şpil, 2D wizual ulgam, Pnewmatik ýüzýän elektrik şpil,
|