BRTIRPH1210A, BORUNTE tarapyndan kebşirlemek, arassalamak we üwemek amaly pudaklary üçin işlenip düzülen alty okly robot. Ykjam görnüşde, ululygy kiçi, agramy ýeňil, iň ýokary ýüki 10 kg we gol uzynlygy 1225mm. Bilegi simleri has amatly we hereketi has çeýe edýän çukur gurluşy kabul edýär. Birinji, ikinji we üçünji bogunlaryň hemmesi ýokary takyklykly reduktorlar, dördünji, bäşinji we altynjy bogunlaryň hemmesi ýokary takyklykly dişli gurluşlar bilen enjamlaşdyrylan. Speedokary tizlikli bilelikdäki tizlik çeýe işlemäge mümkinçilik berýär. Gorag derejesi IP54-e ýetýär. Toz we suw geçirmeýän. Gaýtalama ýerleşiş takyklygy ± 0.07mm.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Haryt | Aralyk | Iň ýokary tizlik | ||
| Arm | J1 | ± 165 ° | 164 ° / s | |
| J2 | -95 ° / + 70 ° | 149 ° / s | ||
| J3 | ± 80 ° | 185 ° / s | ||
| Bilek | J4 | ± 155 ° | 384 ° / s | |
| J5 | -130 ° / + 120 ° | 396 ° / s | ||
| J6 | ± 360 ° | 461 ° / s | ||
|
| ||||
| Goluň uzynlygy (mm) | Adingüklemek ukyby (kg) | Gaýtalama ýerleşiş takyklygy (mm) | Kuwwat çeşmesi (kVA) | Agramy (kg) |
| 1225 | 10 | ± 0.07 | 4.30 | 155  1. Professional polat robot goluny satyn almagyň artykmaçlyklary näme? BORUNTE polishing senagat robotlary önümçiligiň netijeliligini ýokarlandyryp, önümiň hilini ýokarlandyryp, zähmet çykdajylaryny we adam ýalňyşlyk töwekgelçiligini azaldyp biler, has ýokary iş şertlerini üpjün etmek üçin ýokary temperaturada, zyýanly gazda we beýleki şertlerde işläp biler. 2. Islegleriňize laýyk gelýän ýalpyldawuk senagat robotyny nädip saýlamaly? Robot saýlanyňyzda aşakdaky faktorlar göz öňünde tutulmalydyr: iş ýüki, iş meýdany, takyklyk talaplary, iş tizligi, howpsuzlyk talaplary, programmirleme we amaly ýönekeýlik, tehniki hyzmat talaplary we býudjet çäklendirmeleri. Şol bir wagtyň özünde has jikme-jik teklipleri almak üçin üpjün edijiler we hünärmenler bilen maslahatlaşmalar hem geçirilmelidir. Professional polishing robot golunyň möhüm aýratynlyklary: 1. Takyklyk we gaýtalanma: Polishing işi adatça ýokary takyk hereketi we yzygiderli işlemegi talap edýär. Senagat robotlary, her bir işde yzygiderli netijeleri üpjün edip, millimetr derejesiniň takyklygy bilen ýerleşip we dolandyryp biler. 2. Awtomatlaşdyrma we netijelilik: Senagat robotlarynyň esasy maksatlaryndan biri önümçiligiň netijeliligini ýokarlandyrmakdyr. Ishinguwmak prosesi adatça kyn we köp wagt talap edýär, ýöne robotlar işleri çalt we yzygiderli ýerine ýetirip, önümçilik liniýasynyň umumy netijeliligini ýokarlandyryp bilerler. 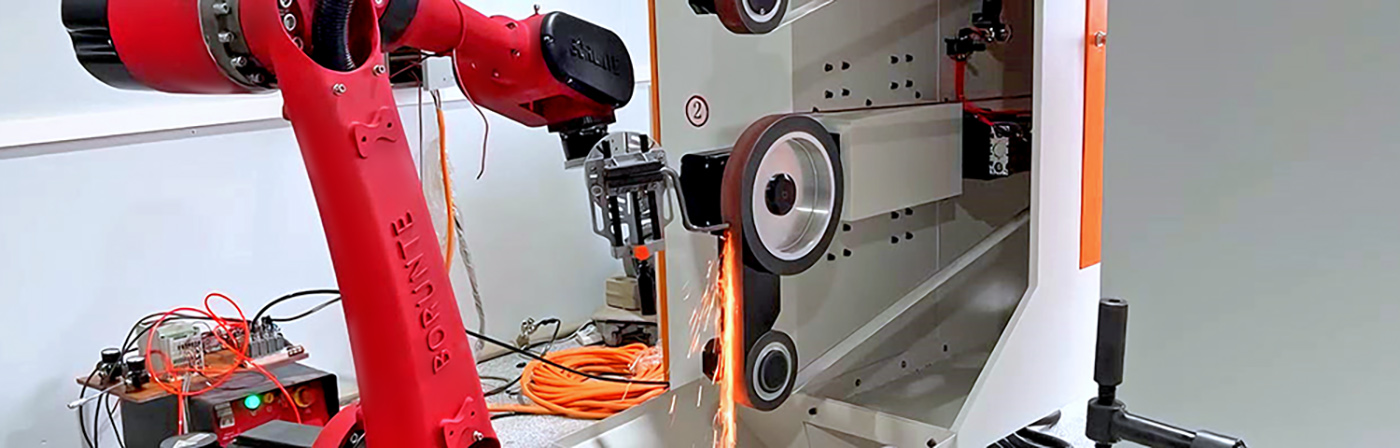  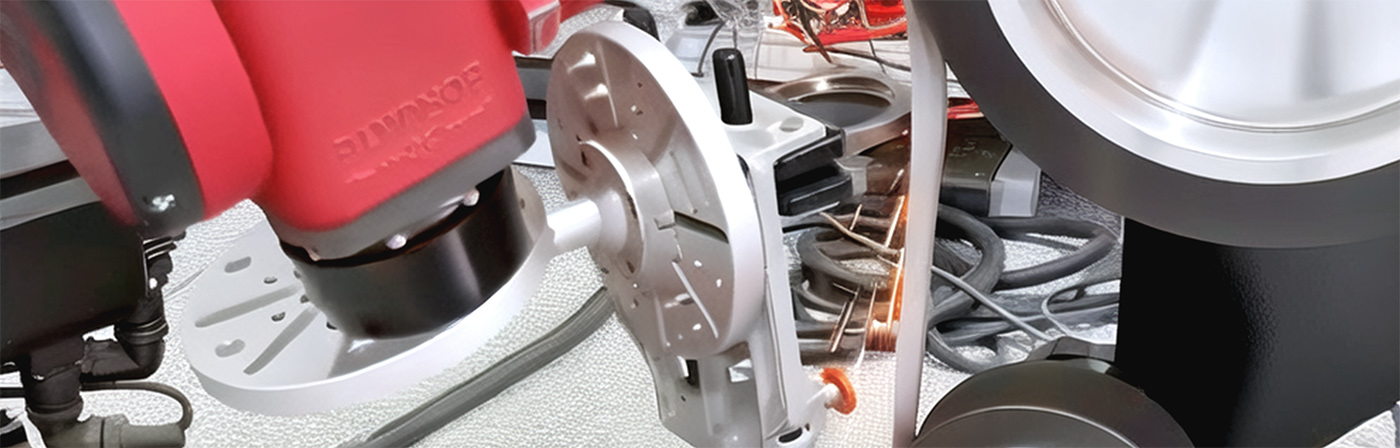 
Önüm kategoriýalaryBORUNTE we BORUNTE integratorlaryBORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
© Copyright - 2010-2024: Rightshli hukuklar goralan.Sahypanyň kartasy - AMP Mobile Pnewmatik ýüzýän pnewmatik şpil, Gubka sorujy käseler, Pnewmatik ýüzýän elektrik şpil, Ok güýji pozisiýasynyň öwezini dolmak, Magnit däl bölüji, 2D wizual ulgam,
|