



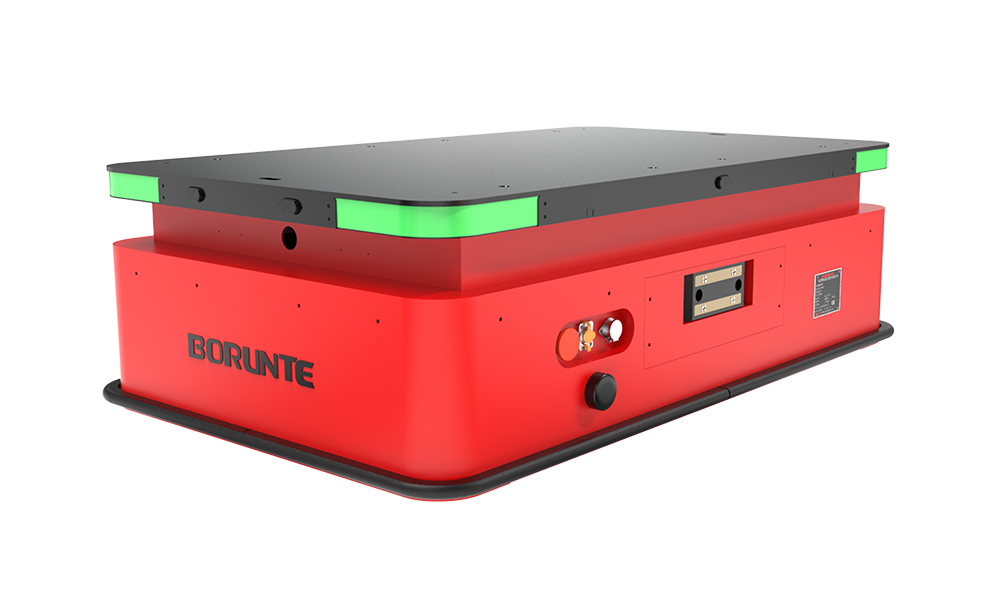
BRTAGV21050A, 500 kg agramly lazer SLAM nawigasiýasyny ulanyp, ykjam robot platformasydyr. Materiallary tutmak ýa-da ýerleşdirmek funksiýasyny durmuşa geçirmek üçin pes basyşly kooperatiw robot goly bilen gabat gelip biler we köp sahypaly material geçirmek we tutmak üçin amatlydyr. Platformanyň ýokarsy, köp önümçilik liniýalarynyň arasynda material geçirişini amala aşyrmak, önümçilik prosesleriniň awtomatlaşdyrylyşyny has-da gowulandyrmak we önümçiligiň netijeliligini ýokarlandyrmak üçin rulolar, guşaklar, zynjyrlar we ş.m. ýaly dürli şekilli geçiriş modullary bilen enjamlaşdyrylyp bilner.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Nawigasiýa tertibi | Lazer SLAM |
| Işletmek tertibi | Iki rul |
| L * W * H. | 1140mm * 705mm * 372mm |
| Burulýan radius | 645mm |
| Agram | Takmynan 150 kg |
| Bahalandyrylan ýük | 500kg |
| Ounderiň arassalanylyşy | 17.4mm |
| Iň ýokary tabak ölçegi | 1100mm * 666mm |
| Öndürijilik parametrleri | |
| Trafik | ≤5% eňňit |
| Kinematiki takyklyk | ± 10mm |
| Kruiz tizligi | 1m / s (≤1.5m / s) |
| Batareýanyň parametrleri | |
| Batareýanyň parametrleri | 0.42kVA |
| Üznüksiz iş wagty | 8H |
| Zarýad bermek usuly | El bilen, awto, çalt çalyşmak |
| Equipmentörite enjamlar | |
| Lazer radar | ✓ |
| QR kod okaýjy | × |
| Gyssagly kömek düwmesi | ✓ |
| Spiker | ✓ |
| Atmosfera çyrasy | ✓ |
| Çaknyşyklara garşy zolak | ✓ |

BRTAGV21050A enjamlara hyzmat etmek :
1. Lazer üçin hepdede bir gezek we rul we uniwersal tigir üçin aýda bir gezek. Her üç aýdan howpsuzlyk bellikleri we düwmeleri synagdan geçmeli.
2. Robotyň hereketlendiriji tekeri we uniwersal tigir poliuretandan ybarat bolany üçin, ýygy-ýygydan arassalanmagy talap edip, giňden ulanylandan soň ýerde yz galdyrar.
3. Robot korpusy yzygiderli arassalanmalydyr.
BRTAGV21050A-nyň esasy aýratynlyklary:
1. capacityokary kuwwatly batareýa “Composite Mobile Robot” platformasyna has uzak iş möhletini berýär. Sekiz sagat bir zarýadda ulanylyp bilner, bu ammarlar, zawodlar we paýlaýyş merkezleri ýaly uly desgalarda ulanmak üçin ajaýyp edýär.
2. Kompozit ykjam robot platformasy diýseň uýgunlaşdyrylan we çylşyrymly işleýşi we aýratynlyklary sebäpli logistika, önümçilik, saglygy goraýyş, myhmansöýerlik we bölek satuw ýaly dürli pudaklarda ulanylyp bilner. Saýlamak we gaplamak, inwentarlary dolandyrmak, önümiň hilini üpjün etmek we hatda eltip bermek roboty ýaly hyzmatlar üçin ulanylyp bilner.
3. Kompozit ykjam robot platformasy logistika pudagyna möhüm artykmaçlyklary hödürleýär. Jübi robotlary çig mal ýa-da taýýar önümler ýaly önümleri bir ýerden başga ýere geçirmek üçin ulanylyp bilner, bu bolsa wagt tygşytlar we öndürijiligi ýokarlandyrar. Şeýle hem, platforma özbaşdak nawigasiýa mümkinçiliklerine eýedir, bu oňa az adam işlemäge mümkinçilik berýär we iş ýerindäki näsazlyklaryň ähtimallygyny peseldýär.



-

Ammarlary sortlamak
-
Adingüklemek we düşürmek
-
Awtomatiki usulda işlemek




BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



Pnewmatik ýüzýän pnewmatik şpil, Magnit däl bölüji, Gubka sorujy käseler, Ok güýji pozisiýasynyň öwezini dolmak, Pnewmatik ýüzýän elektrik şpil, 2D wizual ulgam,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky