Önümiň tanyşdyrylyşy
BRTN30WSS5PF 2200T-4000T plastmassa sanjym galyplaýyş maşynlarynyň, bäş okly AC servo sürüjisiniň, bilekdäki AC servo okunyň ähli görnüşlerine laýyk gelýär. Mugt armatura sazlamaga, hyzmat möhletini uzaltmaga, ýokary takyklygy, pes näsazlyk derejesini we ýönekeý tehniki hyzmaty üpjün etmäge mümkinçilik berýän 360 dereje A okunyň aýlanmagy we 180 dereje C okunyň aýlanmagy bar. Esasan çalt sanjym we kyn burç sanjymlary üçin ulanylýar. Esasanam awtoulaglar, kir ýuwýan maşynlar we öý enjamlary ýaly uzyn görnüşli enjamlar üçin ideal.Bäş okly sürüjiwe gözegçilik ediji integrirlenen ulgam: minimal birleşdiriji liniýalar, uzak aralyk aragatnaşygy we giňeliş öndürijiligi Güýçli päsgelçiliklere garşy ukyplylyk, ýokary gaýtalanma takyklygy, birbada köp oky dolandyrmak ukyby, ýönekeý enjamlara hyzmat etmek we pes näsazlyk derejesi.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
Esasy parametrler
| Kuwwat çeşmesi (KVA) | Maslahat berilýän IMM (tonna) | Gezelenç | EOAT modeli | ||||||||||||||||||||||||||||||||
| 6.11 | 2200T-4000T | AC Servo motor | femişlerimiz iki armatura(sazlap bolýar) | ||||||||||||||||||||||||||||||||
| Gezelenç urmagy (mm) | Kesgitli urgy (mm) | Dik urgy (mm) | Iň köp ýüklemek (kg) | ||||||||||||||||||||||||||||||||
| Arkanyň umumy uzynlygy: 6m | 2500 we aşakda | 3000we aşakda | 60 | ||||||||||||||||||||||||||||||||
| Gury wagt alyň (sek) | Gury sikl wagty (sek) | Howany sarp etmek (NI / sikl) | Agramy (kg) | ||||||||||||||||||||||||||||||||
| garaşylýar | garaşylýar | 47 | Standart däl Modeliň görkezilmegi: W: Teleskopiki görnüş. S: Önümiň goly. S4: AC Servo Motor tarapyndan dolandyrylýan dört ok (Travers-ok 、 C-ok 、 Dik ok + kesel ugry) Cycleokarda agzalan sikl wagty, kompaniýamyzyň içerki synag standartynyň netijesidir. Enjamyň hakyky ulanylyş prosesinde, hakyky işleýşine görä üýtgeýär. Traýektory diagrammasy
Gowulaşma we beýleki sebäpler boýunça spesifikasiýa we daşky görnüş üýtgedilen bolsa, mundan beýläk habar berilmez. Düşüneniňiz üçin sag boluň. Manipulýator golunyň her bir bölegi üçin ýörite gözleg amallary1. Gurluş funksiýasyny tassyklamak A ction Sorujy käsede zeper ýa-da hapa barmy? 2. Komponentleriň gowşakdygyny barlaň A late Gapdal duruş topary boşmy? 3. Gollanma çybyklary we podşipnikler üçin ýag çalmagy A rod Tozany we pos tegmillerini aýyrmak, hasany arassalamak 4. 4 slaýdly slaýd slaýd toplumyny ýaglamak we hyzmat etmek A dust Tozany we pos tegmillerini aýyrmak üçin ýoly arassalamaly 5. Daş görnüşi arassalamak we tertiplemek A machine Enjamyň üstündäki tozanlary aýyrmak we aýyrmak 6. Nebit basyşynyň buferini funksional gözden geçirmek A machine Maşynyň tizliginiň gaty çaltdygyny barlaň 7. Iki nokat kombinasiýasyna hyzmat etmek A water Suw käsesinde suwuň ýa-da ýagyň bardygyny barlaň we arassalamak üçin öz wagtynda suwlaň 8. Gurluşy we göwre berkidiji nurbatlary barlaň A the Gurluş birikdiriji blokyň berkidiji nurbatlarynyň we maşyn korpusynyň nurbatlarynyň boşdugyny barlaň 9. Sinhron guşak barlagy A syn Sinhron kemeriň ýüzüniň ýagdaýynyň gowydygyny ýa-da diş görnüşinde eşikleriň bardygyny barlaň. 10. Iki nokat kombinasiýa barlagy A water Suw käsesindäki suwy, ýagy ýa-da hapalary barlaň, öz wagtynda (her aý) arassalaň we arassalaň; Gysga wagtyň içinde gaty köp hapalar bar bolsa, gaz çeşmesiniň öň tarapynda gazdan öňki arassalaýjy enjam goşulmaly; 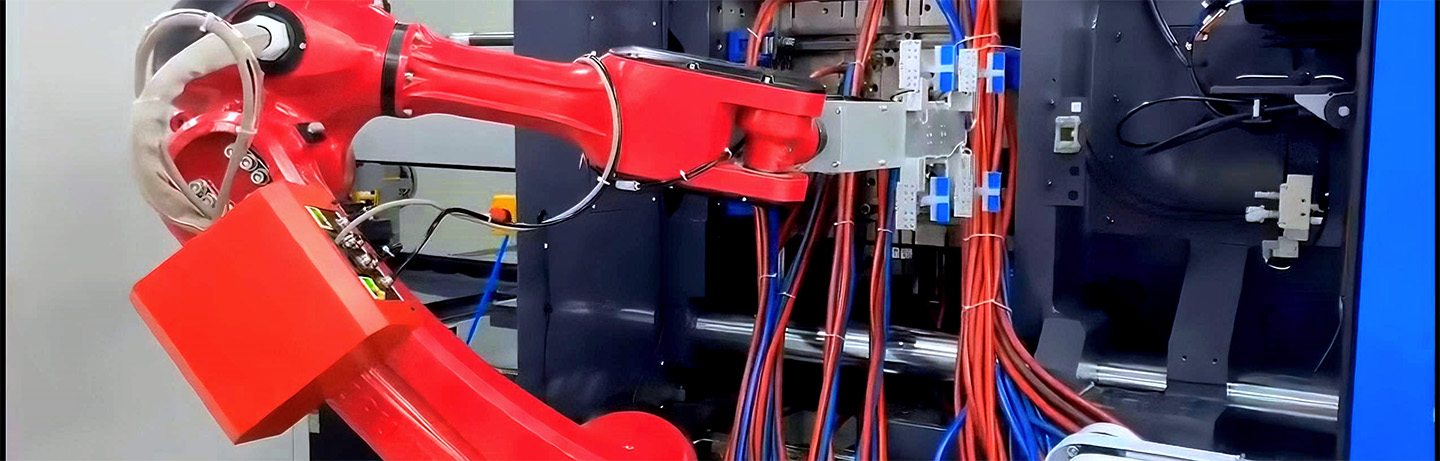
Önüm kategoriýalaryBORUNTE we BORUNTE integratorlaryBORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
© Copyright - 2010-2024: Rightshli hukuklar goralan.Sahypanyň kartasy - AMP Mobile Ok güýji pozisiýasynyň öwezini dolmak, Gubka sorujy käseler, Pnewmatik ýüzýän pnewmatik şpil, Magnit däl bölüji, Pnewmatik ýüzýän elektrik şpil, 2D wizual ulgam,
|