




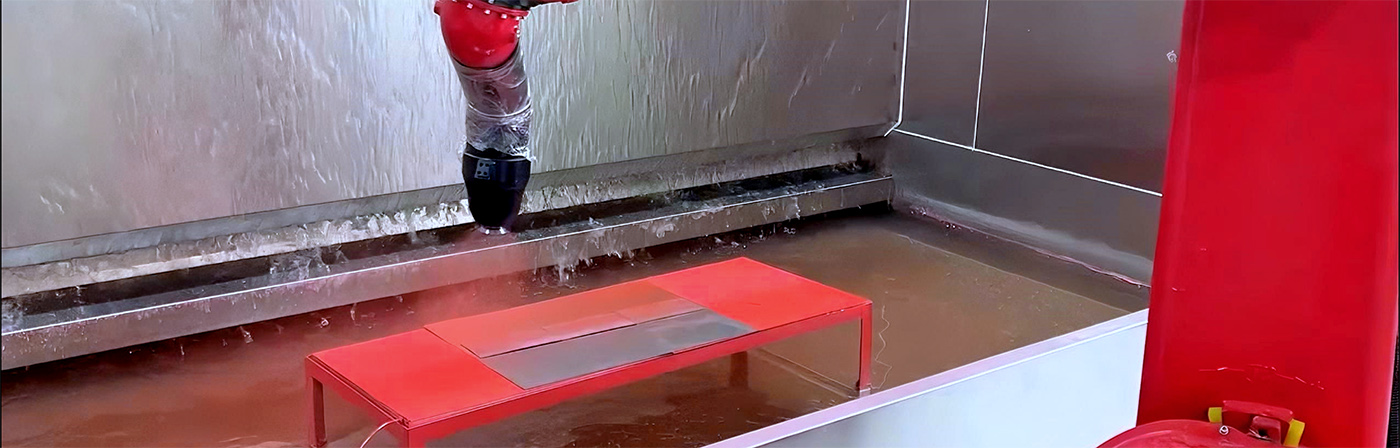
Alty okly robot BRTIRSE2013F, 2000 mm uzynlygy we iň ýokary agramy 13 kg bolan partlama garşy pürküji robot. Robotyň görnüşi ykjam we her bir bogun ýokary takyklykly reduktor bilen gurlupdyr we ýokary tizlikli bilelikdäki tizlik çeýe amallary amala aşyryp biler, bu tozan pudagy we aksesuarlary gaýtadan işlemek meýdançasyna giňden ulanylyp bilner. Gorag derejesi IP65-e ýetýär. Toz we suw geçirmeýän. Gaýtalama ýerleşiş takyklygy ± 0,5mm.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Haryt | Aralyk | Iň ýokary tizlik | ||
| Arm | J1 | ± 162.5 ° | 101,4 ° / s | |
| J2 | ± 124 ° | 105,6 ° / s | ||
| J3 | -57 ° / + 237 ° | 130.49 ° / s | ||
| Bilek | J4 | ± 180 ° | 368,4 ° / s | |
| J5 | ± 180 ° | 415.38 ° / s | ||
| J6 | ± 360 ° | 545.45 ° / s | ||
|
| ||||
| Goluň uzynlygy (mm) | Adingüklemek ukyby (kg) | Gaýtalama ýerleşiş takyklygy (mm) | Kuwwat çeşmesi (kVA) | Agramy (kg) |
| 2000 | 13 | ± 0,5 | 6.38 | 385 |

Näme üçin robot sepmek partlama garşy funksiýalary goşmaly?
1. Howply şertlerde işlemek: Himiýa zawodlary, nebiti gaýtadan işleýän zawodlar ýa-da reňk stendleri ýaly käbir önümçilik şertlerinde ýangyjy gazlar, buglar ýa-da tozan bolup biler. Partlamadan goraýan dizaýn, robotyň bolup biläýjek partlaýjy atmosferalarda howpsuz işlemegini üpjün edýär.
2. Howpsuzlyk düzgünleriniň berjaý edilmegi: lamangyjy materiallary sepmek bilen baglanyşykly pudaklaryň köpüsi berk howpsuzlyk düzgünlerine we görkezmelerine tabyn. Partlama garşy robotlary ulanmak, bu howpsuzlyk ülňüleriniň berjaý edilmegini üpjün edýär, howpsuzlyk düzgünleri sebäpli potensial jerime ýa-da ýapylmazlyk.
3. Insurancetiýaçlandyryş we jogapkärçilik aladalary: Howply şertlerde işleýän kompaniýalar köplenç has ýokary ätiýaçlandyryş tölegleri bilen ýüzbe-ýüz bolýarlar. Partlama garşy robotlary ulanmak we howpsuzlyga ygrarlylygy görkezmek bilen kompaniýalar ätiýaçlandyryş çykdajylaryny azaldyp, waka ýüze çykan halatynda jogapkärçiligi çäklendirip bilerler.
4. Howply materiallary dolandyrmak: Käbir programmalarda robot sepmek zäherli ýa-da howply materiallar bilen işläp biler. Partlama garşy dizaýn, bu materiallaryň islendik çykarylmagynyň partlaýjy ýagdaýlara eltmezligini üpjün edýär.
Iň erbet ýagdaýlara ýüzlenmek: Robotyň işleýşi wagtynda howpsuzlyk çäreleri we töwekgelçiligi bahalandyrmak göz öňünde tutulsa-da, garaşylmadyk hadysalar bolup biler. Partlamadan goraýan dizaýn, iň erbet ýagdaýyň netijelerini azaltmak üçin seresaplylyk çäresidir.

BRTIRSE2013F aýratynlyklary :
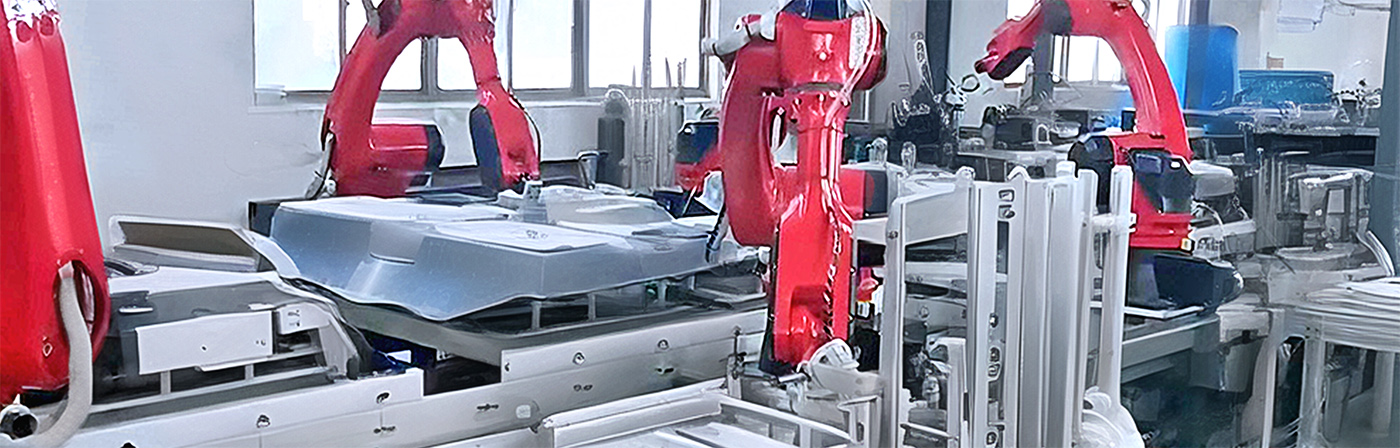
RV reduktor we planetar reduktorly sero hereketlendirijiniň gurluşy, güýçli göterijilik ukyby, uly iş aralygy, çalt tizlik we ýokary takyklyk bilen kabul edilýär.
Dört ok, bäş alty şah, soňundaky içi boş simleri amala aşyrmak üçin yzky motor dizaýnyny kabul edýär.
Dolandyryş ulgamynyň el bilen işleýän operatory öwrenmek aňsat we önümçilik üçin örän amatly.
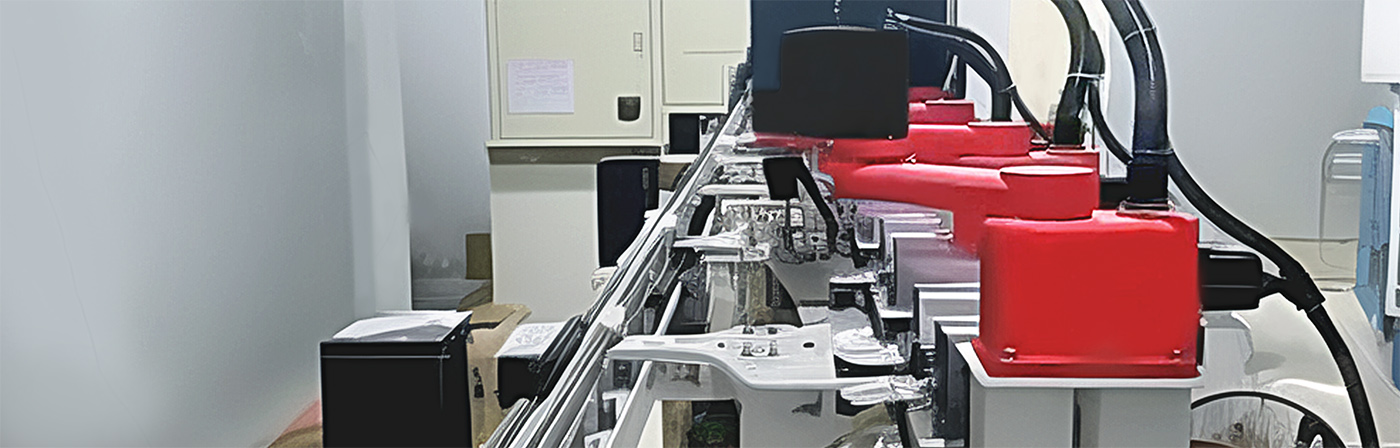
Robot korpusy howpsuz we ekologiýa taýdan arassa bölekleýin içerki simleri kabul edýär.
-
sepmek
-
ýelimlemek
-
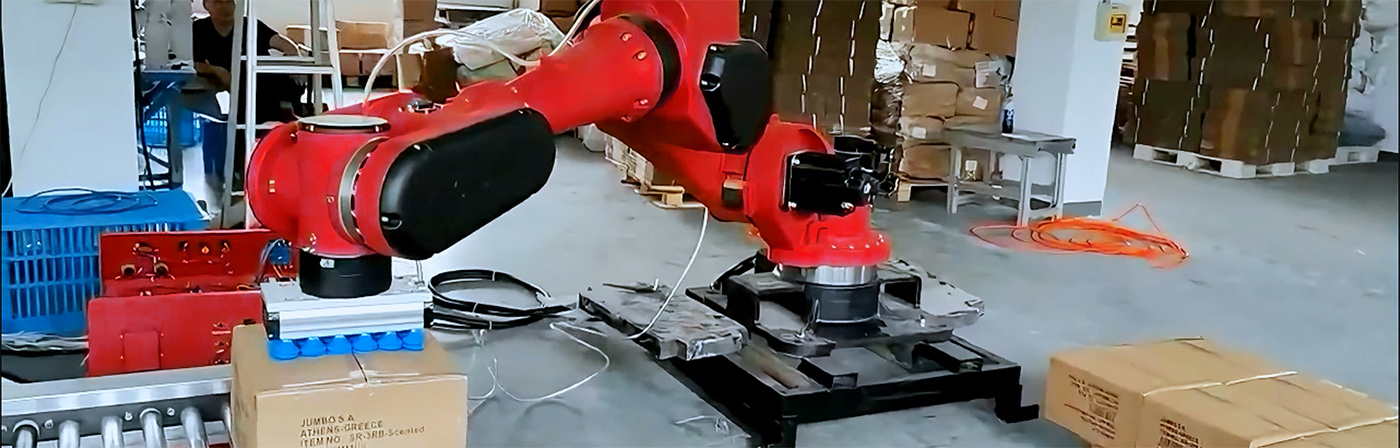
ulag
-
gurnama





BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



Gubka sorujy käseler, Pnewmatik ýüzýän pnewmatik şpil, Pnewmatik ýüzýän elektrik şpil, Magnit däl bölüji, Ok güýji pozisiýasynyň öwezini dolmak, 2D wizual ulgam,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky