




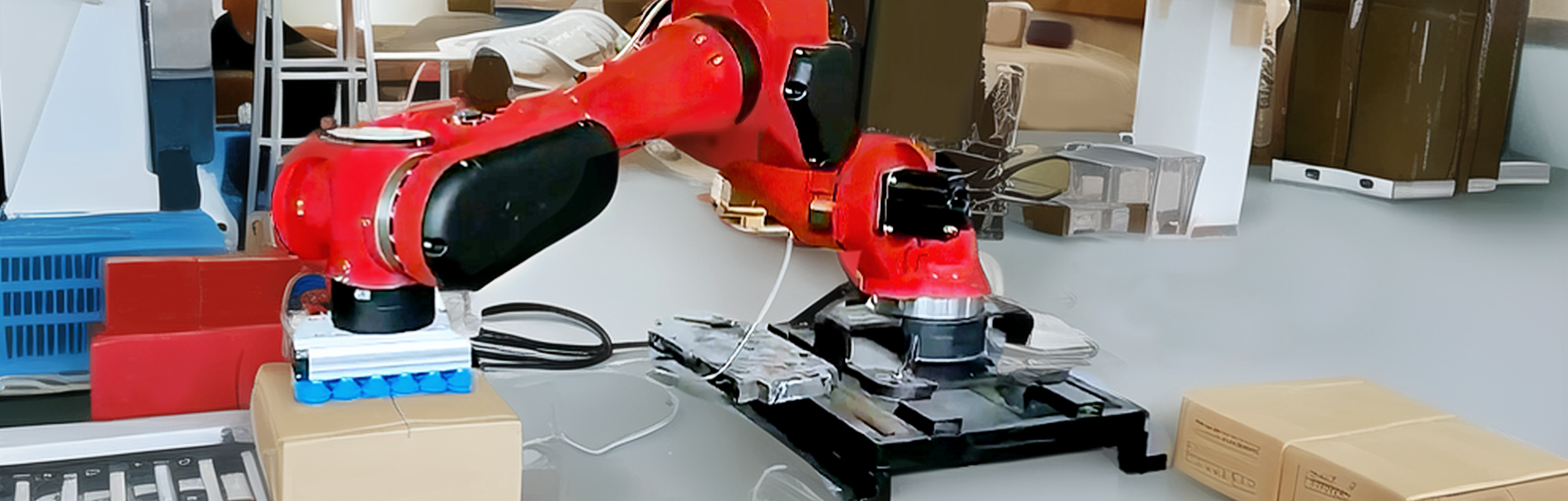
BRTIRPL1608A görnüşli robot, BORUNTE tarapyndan ýeňil, kiçi we dargadylan materiallary ýygnamak, sortlamak we beýleki amaly ssenariler üçin döredilen dört okly robot. Goluň iň uzynlygy 1600mm, iň ýokary ýük 8KG. Gorag derejesi IP40-a ýetýär. Gaýtalama ýerleşiş takyklygy ± 0,1mm.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Haryt | Aralyk | Aralyk | Iň ýokary tizlik | ||
| Master Arm | Upperokarky | 1146mm aralygy urmak üçin ýerüsti gurnama | 38 ° | insult : 25/305/25 (mm) | |
| Hem | 98 ° | ||||
| Ahyrzaman | J4 | ± 360 ° | (Tigirli ýüklemek / ritm) 0kg / 150time / min 、 3kg / 150time / min 、 5kg / 130time / min 、 8kg / 115time / min | ||
| Goluň uzynlygy (mm) | Adingüklemek ukyby (kg) | Gaýtalama ýerleşiş takyklygy (mm) | Kuwwat çeşmesi (kVA) | Agramy (kg) | |
| 1600 | 8 | ± 0.1 | 6.36 | 256 | |

BRTIRPL1608A, BORUNTE-iň tejribeli inersenerler topary tarapyndan geçirilen köp ýyllyk gözlegleriň we ösüşleriň netijesidir. Robotika we awtomatlaşdyryş boýunça tejribelerinden peýdalanyp, häzirki zaman pudaklarynyň hemişe ösýän zerurlyklaryny kanagatlandyrýan robot döretmek üçin dürli tehniki kynçylyklary ýeňip geçdiler. Ösüş prosesi, öndürijiligiň, ygtybarlylygyň we howpsuzlygyň iň ýokary ülňülerini üpjün etmek üçin berk synag, optimizasiýa we inçe düzmek bilen baglanyşyklydy.
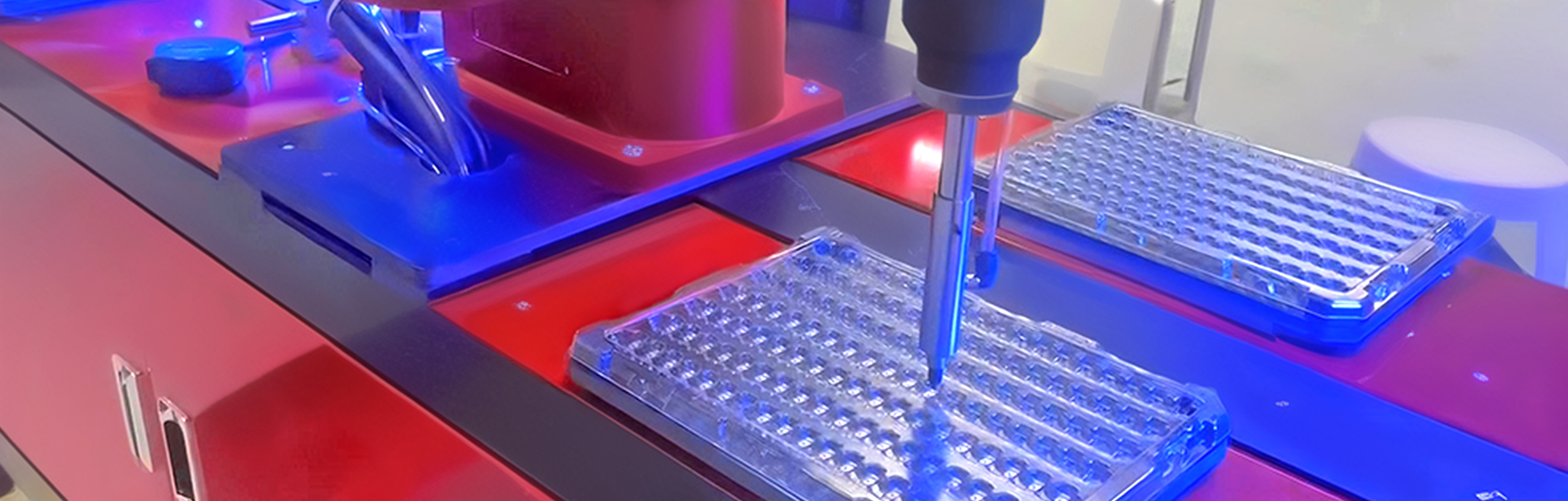
1. Saýlamak we ýeri:Dört okly paralel robot, dürli ululykdaky we şekilli obýektleri netijeli dolandyrmak bilen, seçip alyş işlerinde ajaýyp. Onuň takyk hereketleri we çalt tizligi zatlary çalt tertipleşdirmäge, ýerleşdirmäge we geçirmäge, el zähmetini azaltmaga we öndürijiligi ýokarlandyrmaga mümkinçilik berýär.
2. Mejlis: Highokary takyklygy we köp taraplylygy bilen bu robot gurnama işleri üçin ajaýyp saýlawdyr. Takyk deňleşmegi we ygtybarly birikmeleri üpjün edip, çylşyrymly komponentleri kemsiz dolandyryp biler. Dört okly paralel robot ýygnamak proseslerini tertipleşdirýär, netijede hil gözegçiligi gowulaşýar we ýygnamak wagty azalýar.
3. Gaplamak: Robotyň çalt tizligi we takyk hereketleri ony gaplamak üçin amatly edýär. Önümleri yzygiderli ýerleşdirmegi we gaplama ýalňyşlyklaryny azaldyp, önümleri gutulara, sandyklara ýa-da gaplara çalt gaplap biler. Dört okly paralel robot gaplamagyň netijeliligini optimallaşdyrýar we ýokary göwrümli önümçiligi goldaýar.
1. Dört okly paralel roboty bar bolan önümçilik liniýamyza nädip birleşdirip bilerin?
BORUNTE toplumlaýyn integrasiýa goldawyny berýär. Hünärmenler toparymyz, talaplaryňyza düşünmek we robotyň integrasiýasyny önümçilik liniýaňyza yzygiderli laýyklaşdyrmak üçin siziň bilen ýakyndan işleşer. Goşmaça kömek üçin satuw toparymyz bilen habarlaşyň.
2. Robotyň iň ýokary ýük göterijiligi nämeden ybarat?
Dört okly parallel robot iň köp ýük göterijilik ukyby 8 kg bolup, köp sanly obýektiň we materiallaryň netijeli işlemegini üpjün edýär.
3. Çylşyrymly işleri ýerine ýetirmek üçin robot programmirläp bolarmy?
Elbetde! Awtomatiki parallel sortlaşdyryş senagat roboty ösen programma mümkinçilikleri bilen gelýär. Dürli programmirleme dillerini goldaýar we çylşyrymly meseleleri aňsatlyk bilen programmalaşdyrmak üçin ulanyjy üçin amatly interfeýs hödürleýär. Tehniki goldaw toparymyz, ýörite programmaňyz üçin roboty programmirlemekde size kömek edip biler.
Agyr ýükleýji robotlar üçin programmalar:
Palletizasiýa, depalletizasiýa, sargyt saýlamak we beýleki meseleler agyr ýükleýji robotlar arkaly ýerine ýetirilip bilner. Uly ýükleri dolandyrmak üçin amaly usul hödürleýärler we köp sanly el işlerini awtomatlaşdyrmak, adam zähmetine bolan islegi azaltmak we öndürijiligi ýokarlandyrmak üçin ulanylyp bilner. Agyr ýükleýji gaplaýjy robotlar köplenç awtoulag öndürmekde, azyk we içgileri gaýtadan işlemekde, logistika we paýlanyşda hem ulanylýar.


-
Ulag
-
Sortirlemek
-

Ectionüze çykarmak
-
Görüş





BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



Ok güýji pozisiýasynyň öwezini dolmak, Pnewmatik ýüzýän pnewmatik şpil, Magnit däl bölüji, 2D wizual ulgam, Gubka sorujy käseler, Pnewmatik ýüzýän elektrik şpil,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky