
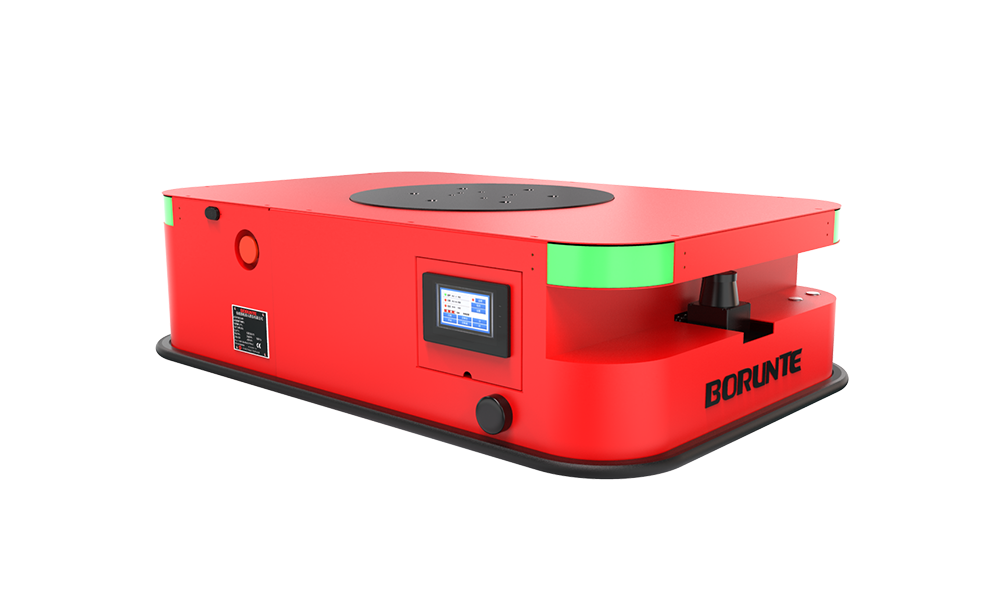



BRTAGV12010A, 100 kg agramly QR kod nawigasiýasy bilen lazer SLAM ulanyp, gizlenýän ulag roboty. Lazer SLAM we QR kod nawigasiýasy birnäçe sahnany we dürli takyklyk talaplaryny kanagatlandyrmak üçin erkin üýtgedilip bilner. Köp tekjeli çylşyrymly sahnalarda, QR kody takyk ýerleşdirmek, gaplamak we işlemek üçin tekjelerde burawlamak üçin ulanylýar. Lazer SLAM nawigasiýasy, ýeriň QR kody bilen çäklenmeýän we erkin işläp bilýän durnukly sahnalarda ulanylýar.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Nawigasiýa tertibi | Lazer SLAM we QR nawigasiýa |
| Işletmek tertibi | Iki tigirli diferensial |
| L * W * H. | 996mm * 646mm * 269mm |
| Burulýan radius | 550mm |
| Agram | Takmynan 130 kg |
| Ratrd ýüklemek | 100kg |
| Ounderiň arassalanylyşy | 32mm |
| Plastinanyň ululygy | R = 200mm |
| Maksimum beýiklik beýikligi | 60mm |
| Öndürijilik parametrleri | |
| Trafik | ≤3% eňňit |
| Kinematiki takyklyk | ± 10 mm |
| Kruiz tizligi | 1 m / s (≤1.2m / s) |
| Batareýanyň parametrleri | |
| Batareýanyň kuwwaty | 24A · H. |
| Üznüksiz iş wagty | ≥8H |
| Zarýad bermek usuly | Gollanma, Awto |
| Equörite enjamlar | |
| Lazer radar | ✓ |
|
|
|
| Gyssagly kömek düwmesi | ✓ |
| Spiker | ✓ |
| Atmosfera çyrasy | ✓ |
| Çaknyşyklara garşy zolak | ✓ |

BRTAGV12010A-nyň alty aýratynlygy:
1. Awtonom: Öňdebaryjy awtomatiki gollanma roboty, göni adam gözegçiliginden garaşsyz işlemäge mümkinçilik berýän datçikler we nawigasiýa ulgamlary bilen enjamlaşdyrylandyr.
2. Çeýeligi: AGV adaty ýollary aňsatlyk bilen gezip bilýär we zerur bolanda beýleki ýollara geçip bilýär.
3. Netijelilik: AGV transport çykdajylaryny azaldyp, eltmegiň takyklygyny ýokarlandyryp biler.
4. Howpsuzlyk: Çaknyşyklaryň öňüni almak we adamlaryň we beýleki maşynlaryň howpsuzlygyny goramak üçin AGV howpsuzlyk gorag enjamlary bilen enjamlaşdyrylandyr.
5. Yzygiderlilik: AGV kesgitlenen borçlary yzygiderli ýerine ýetirip biler.
6. Batareýa bilen işleýän: AGV adaty enjamlardan has uzak wagtlap işlemäge mümkinçilik berýän zarýad berilýän batareýa tehnologiýasyny ulanýar.
Ösen awtomatiki gollanma robotynyň enjamlaryna hyzmat etmek:
1. Ösen awtomatlaşdyrylan gollanma robotynyň gabygy we uniwersal tekeri aýda bir gezek, lazer bolsa hepdede bir gezek barlanmalydyr. Her üç aýdan howpsuzlyk bellikleri we düwmeleri synagdan geçmeli.
2. Robotyň hereketlendiriji tekeri we uniwersal tigir poliuretan bolandygy sebäpli, yzygiderli arassalanmagy talap edip, uzak wagtlap ulanylandan soň ýerde yz galdyrar.
3. Robot korpusy yzygiderli arassalanmalydyr.
4. Lazeriň yzygiderli arassalanmagy zerurdyr. Lazer dogry saklanmasa, robot alamatlary ýa-da palet tekjelerini tanap bilmez; aç-açan düşündiriş bermezden gyssagly duralga ýetip biler.
5. Uzak wagtlap hyzmatdan çykan AGV, poslama garşy çäreler bilen saklanmalydyr, öçürilmelidir we batareýa aýda bir gezek doldurylmalydyr.
6. Differensial dişli planetar reduktor, alty aýdan bir gezek nebiti sanjym etmek üçin barlanmalydyr.
7. Enjamlara hyzmat etmek barada has giňişleýin maglumat üçin ulanyjy gollanmasyna ýüz tutuň.



-

Ammarlary sortlamak
-
Adingüklemek we düşürmek
-
Awtomatiki usulda işlemek




BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



Gubka sorujy käseler, Pnewmatik ýüzýän elektrik şpil, 2D wizual ulgam, Pnewmatik ýüzýän pnewmatik şpil, Ok güýji pozisiýasynyň öwezini dolmak, Magnit däl bölüji,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky