


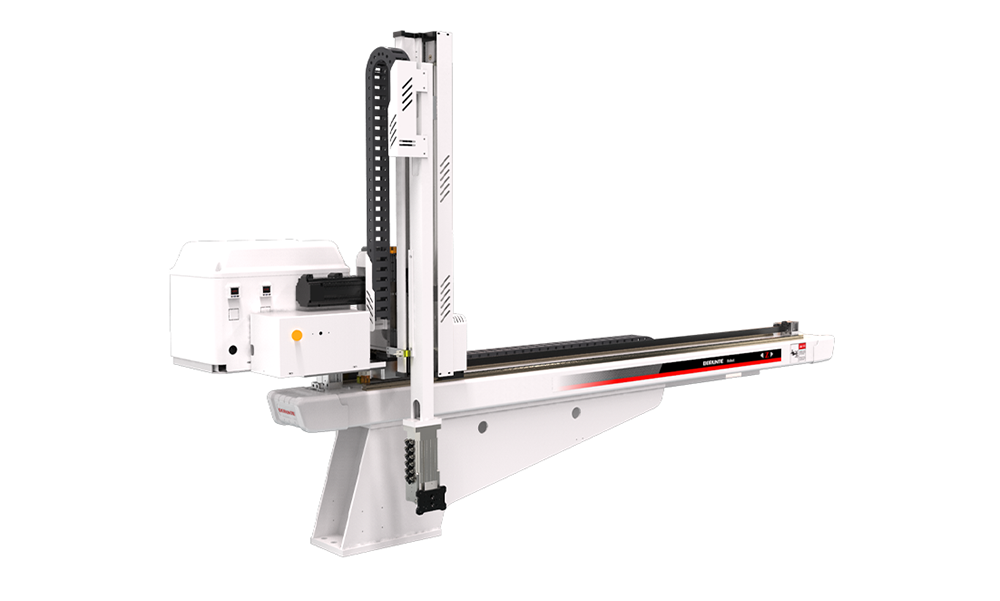
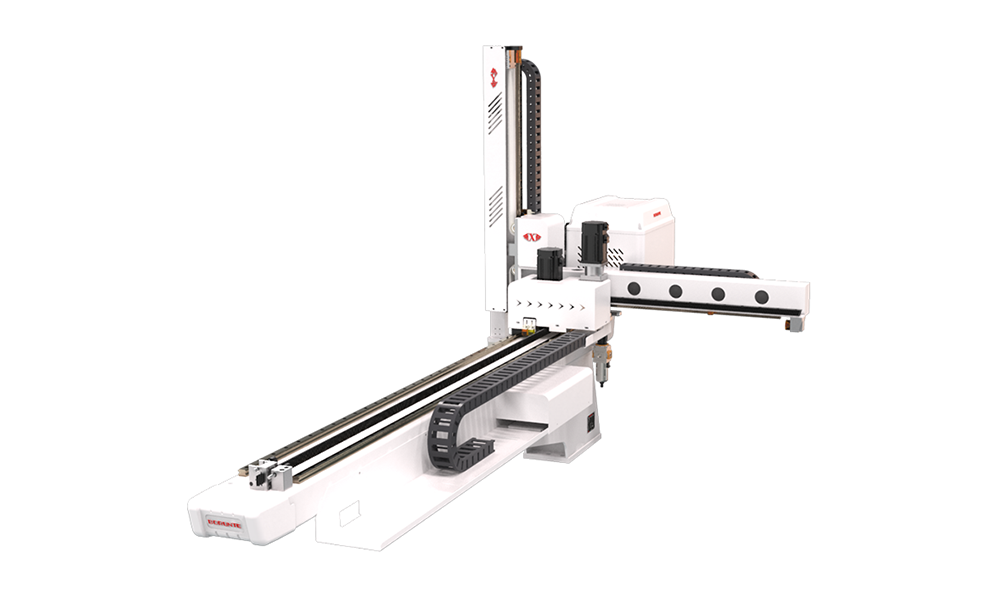
BRTNN11WSS3P / F seriýasy, çykarylýan önümler üçin 250T-480T aralygyndaky gorizontal sanjym maşynynyň ähli görnüşlerine degişlidir. Dik gol, önümiň goly bilen teleskopiki görnüşdir. Üç okly AC servo sürüjisi şuňa meňzeş modellerden, takyk ýerleşişden we gysga emele getiriş siklinden wagt tygşytlaýar. Bu roboty guranyňyzdan soň öndürijilik 10-30% ýokarlanar we önümleriň kemçilik derejesini peselder, operatorlaryň howpsuzlygyny üpjün eder, işçi güýjüni azaldar we galyndylary azaltmak üçin çykaryşa takyk gözegçilik eder. Üç okly sürüji we gözegçilik ediji integrirlenen ulgam: az signal çyzyklary, uzak aralyk aragatnaşygy, oňat giňeliş öndürijiligi, güýçli päsgelçiliklere garşy ukyplylygy, gaýtalanýan ýeriň ýokary takyklygy bir wagtyň özünde birnäçe oky, ýönekeý enjamlara hyzmat etmegi we pes näsazlyk derejesini dolandyryp biler.

Takyk ýerleşiş

Çalt

Uzak hyzmat ömri

Şowsuzlyk derejesi

Zähmeti azaltmak

Telekommunikasiýa
| Kuwwat çeşmesi (kVA) | Maslahat berilýän IMM (tonna) | Gezelenç | EOAT modeli |
| 2.84 | 250T-480T | AC Servo motor | iki sorujy iki armatura |
| Gezelenç urmagy (mm) | Kesgitli urgy (mm) | Dik urgy (mm) | Iň köp ýüklemek (kg) |
| 1700 | 3.2 | 1100 | 10 |
| Gury wagt alyň (sek) | Gury sikl wagty (sek) | Howany sarp etmek (NI / sikl) | Agramy (kg) |
| 1.63 | 6.15 | 3.2 | 305 |
Modeliň görkezilmegi: W: Teleskopiki görnüş. S: Önümiň goly. S3: AC Servo Motor tarapyndan dolandyrylýan üç ok (Travers-ok ert Dik ok + Kesiş oky)
Cycleokarda agzalan sikl wagty, kompaniýamyzyň içerki synag standartynyň netijesidir. Enjamyň hakyky ulanylyş prosesinde, hakyky işleýşine görä üýtgeýär.

| A | B | C | D | E | F | G |
| 1495 | 2727 | 1100 | 513 | 1700 | / | 182.5 |
| H | I | J | K | L | M | N |
| / | / | 1001 | / | 209 | 222 | 700 |
Gowulaşma we beýleki sebäpler boýunça spesifikasiýa we daşky görnüş üýtgedilen bolsa, mundan beýläk habar berilmez. Düşüneniňiz üçin sag boluň.
Üç ok manipulýatoryny ulanmagyň esasy peýdalary:
1. Işgärleri, wagty we pul tygşytlaň
2. Önümçiligi ýokarlandyrmak üçin amatly dolandyryş
3. Girdejini ep-esli ýokarlandyryň
4. Iş howpsuzlygyny ýokarlandyrmak
5. Işiň netijeliligini we önümiň hilini ýokarlandyrmak
6. Programmalaşdyrmak aňsat we ýokary hilli önümçilik
1. Işleýiş döwründe üç ok sanjym galyplaýjy manipulýator awtomatiki işleri ýerine ýetirip biler. El bilen edilýän ýadawlygy azaldyp, el bilen edilýän amallar bilen deňeşdirilende takyklygy ýokarlandyryp biler.
2. Bir gezeklik çykdajylar çykdajylary azaldyp biler. Şol bir wagtyň özünde, bazaryň üýtgemegine jogap hökmünde önümçiligi optimallaşdyryp, bazara çalt uýgunlaşyp we firmalara bazara çalt öwrenişmäge mümkinçilik döredip biler.
3. Üç okly robot goly gurmak önümçilik kuwwatyny ýokarlandyryp biler (20% -30%), önümiň näsazlyk derejesini peseldip biler, operatoryň howpsuzlygyny saklar, işçi güýjüni azaldyp biler, önümçilik mukdaryny dogry dolandyryp we galyndylary ýok edip biler.
1.Bu awtomatiki suw kesýän maşynlar we galyndy goýmak üçin awtomatiki usulda galyndy goýmak maşynlary bilen bilelikde ulanylyp bilner.
2.Bu awtomatiki ýüklemek we düşürmek üçin enjam zarba sektorynda awtomatiki ýüklemek we düşürmek enjamlary bilen bilelikde ulanylyp bilner.
3. Gysgaça aýtsak, üç ok manipulýatory öý enjamlary, awtoulag enjamlary, motosikl esbaplary, LED esbaplary (çyralar), kompýuter esbaplary, aragatnaşyk (jübi telefonlary, planşetler) we dürli görnüşli galyndy sanjym önümlerini almak üçin ulanylýar. gurallar we metrler, elektronika (elektron çilim), dişli önümçilik (dişli), sagat senagaty (sagat gaplary) we ş.m.

-

Sanjym galyplary
Önüm kategoriýalary
-

Dört ok sero bilen dolandyrylýan sanjym manipulýatory BR ...
-

Bäş ok uzyn dik dik urgy manipulýator goly ...
-

Bäş ok uly sanjym manipulýatory BR ...
-

AC servo motorly BRTN30 tarapyndan dolandyrylýan manipulýator goly ...
-

Üç okly AC servo sanjym manipulýatory BRTNG ...
-

Üç okly plastmassa sanjym robot manipulýatory ...
BORUNTE we BORUNTE integratorlary
BORUNTE ekosistemasynda BORUNTE gözleg we gözleg, robotlaryň we manipulýatorlaryň öndürilmegi we satylmagy üçin jogapkärdir. BORUNTE integratorlary, satýan BORUNTE önümleri üçin terminal amaly dizaýnyny, integrasiýasyny we satuwdan soňky hyzmatyny üpjün etmek üçin öz pudagyndan ýa-da meýdan artykmaçlyklaryndan peýdalanýarlar. BORUNTE we BORUNTE integratorlary öz jogapkärçiligini ýerine ýetirýärler we BORUNTE-iň ýagty geljegini öňe sürmek üçin bilelikde işleýärler.
- Telefon: + 86-400-870-8989
- NO.83, Şafu ýoly, Şabu obasy, Dalang şäheri, Dongguan şäheri, Guangdong welaýaty, Hytaý
- borunterobotcoltd@gmail.com



2D wizual ulgam, Magnit däl bölüji, Ok güýji pozisiýasynyň öwezini dolmak, Pnewmatik ýüzýän elektrik şpil, Pnewmatik ýüzýän pnewmatik şpil, Gubka sorujy käseler,
-

vr
-

e-poçta iberiň
-

Telefon
-

Whatsapp
-

Topokarky