



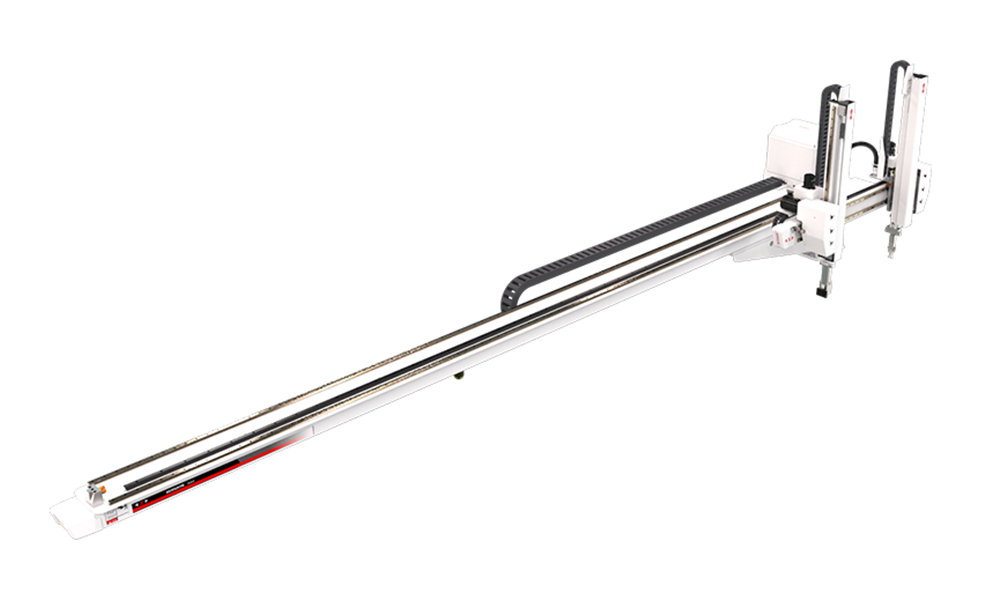
ซีรีส์ BRTV13WDS5P0/F0 ใช้กับเครื่องฉีดแนวนอนทุกประเภทตั้งแต่ 320T-700T สำหรับผลิตภัณฑ์นำออกและป่วง การติดตั้งแตกต่างจากบีมโรบอตแบบเดิมๆ โดยผลิตภัณฑ์จะถูกวางไว้ที่ส่วนท้ายของเครื่องจักรฉีดขึ้นรูป มันมีแขนสองข้าง แขนแนวตั้งเป็นแบบยืดไสลด์และระยะชักแนวตั้งคือ 1300 มม. ไดรฟ์เซอร์โว AC ห้าแกน หลังการติดตั้ง สามารถประหยัดพื้นที่การติดตั้งของอีเจ็คเตอร์ได้ 30-40% และสามารถใช้โรงงานได้อย่างเต็มที่มากขึ้น ช่วยให้ใช้พื้นที่การผลิตได้ดีขึ้น ผลผลิตจะเพิ่มขึ้น 20-30% ลดอัตราข้อบกพร่อง ตรวจสอบให้แน่ใจว่า ความปลอดภัยของผู้ปฏิบัติงาน ลดกำลังคน และควบคุมผลผลิตได้อย่างแม่นยำเพื่อลดของเสีย ระบบรวมไดรเวอร์และตัวควบคุมห้าแกน: เส้นสัญญาณน้อยลง, การสื่อสารทางไกล, ประสิทธิภาพการขยายที่ดี, ความสามารถในการป้องกันการรบกวนที่แข็งแกร่ง, ความแม่นยำสูงของการวางตำแหน่งซ้ำ, สามารถควบคุมหลายแกนได้พร้อมกัน, การบำรุงรักษาอุปกรณ์อย่างง่าย และอัตราความล้มเหลวต่ำ

การวางตำแหน่งที่แม่นยำ

เร็ว

อายุการใช้งานยาวนาน

อัตราความล้มเหลวต่ำ

ลดแรงงาน

โทรคมนาคม
| แหล่งพลังงาน (kVA) | IMM ที่แนะนำ (ตัน) | ขับเคลื่อนด้วยทราเวิร์ส | แบบจำลองของ กพท |
| 3.40 | 320T-700T | เอซีเซอร์โวมอเตอร์ | การดูดสองครั้ง การติดตั้งสองรายการ |
| ระยะการเคลื่อนที่ (มม.) | จังหวะขวาง (มม.) | จังหวะแนวตั้ง (มม.) | โหลดสูงสุด (กก.) |
| ซุ้มโค้งแนวนอนที่มีความยาวรวมไม่เกิน 6 เมตร | รอดำเนินการ | 1300 | 8 |
| เวลานำออกแบบแห้ง (วินาที) | ระยะเวลารอบการแห้ง (วินาที) | ปริมาณการใช้อากาศ (NI/รอบ) | น้ำหนัก (กก.) |
| 2.3 | รอดำเนินการ | 9 | ไม่ได้มาตรฐาน |
การแสดงโมเดล: W:ประเภทกล้องส่องทางไกล D:แขนผลิตภัณฑ์ + แขนรองชนะเลิศ S5: ห้าแกนขับเคลื่อนด้วยมอเตอร์เซอร์โว AC (แกนขวาง、แกนแนวตั้ง + แกนขวาง)
รอบเวลาดังกล่าวข้างต้นเป็นผลจากมาตรฐานการทดสอบภายในของบริษัทเรา ในกระบวนการใช้งานจริงของเครื่องจะแตกต่างกันไปตามการใช้งานจริง

| A | B | C | D | E | F | G | O |
| 1614 | ≤6ม | 162 | รอดำเนินการ | รอดำเนินการ | รอดำเนินการ | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | รอดำเนินการ | รอดำเนินการ | 253.5 | 399 | รอดำเนินการ | 549 | รอดำเนินการ |
| Q | |||||||
| 1300 | |||||||
ไม่มีการแจ้งให้ทราบเพิ่มเติมหากข้อมูลจำเพาะและรูปลักษณ์มีการเปลี่ยนแปลงเนื่องจากการปรับปรุงและเหตุผลอื่นๆ ขอบคุณสำหรับความเข้าใจของคุณ.

1. สวิตช์สถานะ
จี้การสอนของแขนหุ่นยนต์ฉีดขึ้นรูปมีสามสถานะ: แบบแมนนวล หยุด และอัตโนมัติ [แมนนวล]: หากต้องการเข้าสู่โหมดแมนนวล ให้เลื่อนสวิตช์สถานะไปทางซ้าย [หยุด]: หากต้องการเข้าสู่สถานะหยุด ให้เลื่อนสวิตช์สถานะไปที่ตรงกลาง สามารถตั้งค่าพารามิเตอร์ได้ในขั้นตอนนี้ [อัตโนมัติ]: หากต้องการเข้าสู่สถานะอัตโนมัติ ให้เลื่อนสวิตช์สถานะไปที่ตรงกลาง การตั้งค่าอัตโนมัติและสอดคล้องกันสามารถทำได้ในสภาวะนี้
2. ปุ่มฟังก์ชั่น
ปุ่ม [เริ่ม]:
ฟังก์ชั่น 1: ในโหมดอัตโนมัติ กด "เริ่ม" เพื่อเริ่มหุ่นยนต์โดยอัตโนมัติ
ฟังก์ชั่น 2: ในสถานะ Stop กด "Origin" จากนั้น "Start" เพื่อคืนค่าตัวจัดการให้กลับสู่จุดเริ่มต้น
ฟังก์ชั่น 3: ในสถานะ Stop กด "HP" จากนั้น "Start" เพื่อรีเซ็ตต้นกำเนิดของตัวจัดการ
ปุ่ม [หยุด]:
ฟังก์ชัน 1: ในโหมดอัตโนมัติ กด "หยุด" และแอปพลิเคชันจะหยุดเมื่อโมดูลเสร็จสิ้น ฟังก์ชั่น 2: เมื่อมีการแจ้งเตือนเกิดขึ้น ให้แตะ "หยุด" ในโหมดอัตโนมัติเพื่อลบการแสดงการแจ้งเตือนที่แก้ไขแล้ว
ปุ่ม [ต้นกำเนิด]: ใช้ได้กับการดำเนินการกลับบ้านเท่านั้น โปรดดูส่วนที่ 2.2.4 "วิธีการกลับบ้าน"
ปุ่ม [HP]: กด "HP" จากนั้น "Start แกนทั้งหมดจะรีเซ็ตตามลำดับ Y1, Y2 Z, X1 และ X2, Y1 และ Y2 จะกลับไปเป็น 0 และ Z, X1 และ X2 จะกลับสู่จุดเริ่มต้น ตำแหน่งของโปรแกรม
ปุ่ม [เพิ่ม/ลดความเร็ว]: ปุ่มทั้งสองนี้สามารถใช้เพื่อปรับความเร็วโดยรวมในสถานะ Manual และ Auto
ปุ่ม [หยุดฉุกเฉิน]: ในกรณีฉุกเฉิน การกดปุ่ม "หยุดฉุกเฉิน" จะเป็นการปิดแกนทั้งหมดและส่งเสียงเตือน "หยุดฉุกเฉิน" หลังจากถอดปุ่มออกแล้ว ให้กดปุ่ม "Stop" เพื่อปิดเสียงปลุก

-

การฉีดขึ้นรูป





ผู้รวมระบบ BORUNTE และ BORUNTE
ในระบบนิเวศของ BORUNTE BORUNTE รับผิดชอบด้านการวิจัยและพัฒนา การผลิต และการขายหุ่นยนต์และผู้ควบคุม ผู้ประกอบระบบ BORUNTE ใช้ข้อได้เปรียบทางอุตสาหกรรมหรือภาคสนามของตนเพื่อมอบการออกแบบแอปพลิเคชันเทอร์มินัล การบูรณาการ และบริการหลังการขายสำหรับผลิตภัณฑ์ BORUNTE ที่พวกเขาขาย ผู้รวมระบบ BORUNTE และ BORUNTE ปฏิบัติตามความรับผิดชอบของตนและเป็นอิสระจากกัน โดยทำงานร่วมกันเพื่อส่งเสริมอนาคตที่สดใสของ BORUNTE
- โทร:+86-400-870-8989
- NO.83 ถนน Shafu หมู่บ้านชาบู เมืองต้าหลาง เมืองตงกวน มณฑลกวางตุ้ง ประเทศจีน
- borunterobotcoltd@gmail.com



ถ้วยดูดฟองน้ำ, ระบบภาพ 2 มิติ, ตัวชดเชยตำแหน่งแรงตามแนวแกน, แกนหมุนลมแบบลอยตัวแบบนิวแมติก, แกนหมุนไฟฟ้าแบบลอยตัวแบบนิวแมติก, ตัวแยกแม่เหล็กที่ไม่ใช่,
-

วีอาร์
-

อีเมล
-

โทรศัพท์
-

วอทส์แอพพ์
-

สูงสุด