
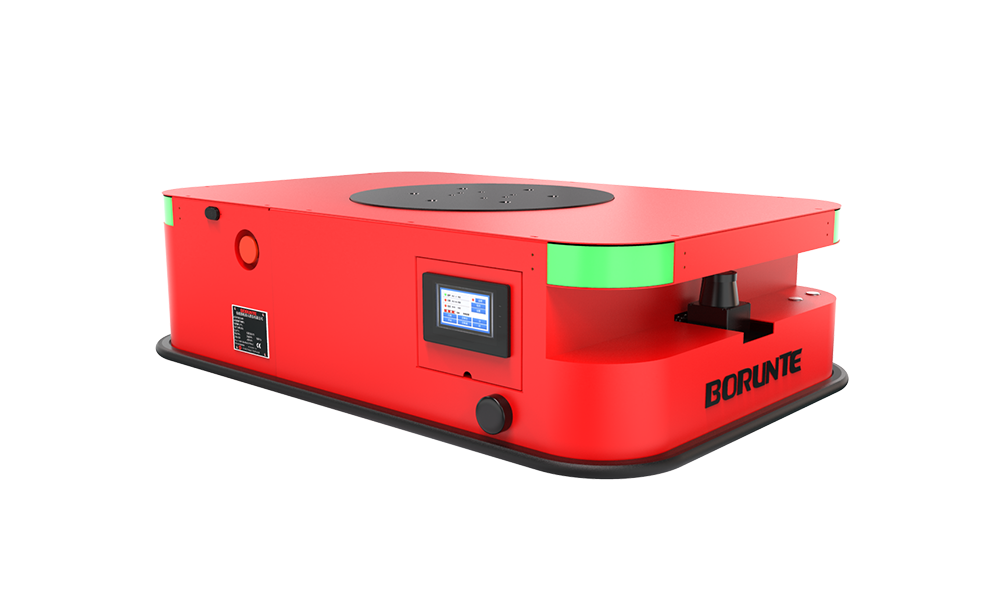



BRTAGV12010A คือหุ่นยนต์ขนย้ายแบบแจ็คอัพที่ซุ่มซ่อนโดยใช้เลเซอร์สแลมพร้อมการนำทางด้วยรหัส QR โดยมีน้ำหนักบรรทุก 100 กก. สามารถเปลี่ยนการนำทาง Laser SLAM และ QR code ได้อย่างอิสระเพื่อให้ตรงตามฉากต่างๆ และข้อกำหนดด้านความแม่นยำที่แตกต่างกัน ในฉากที่ซับซ้อนซึ่งมีชั้นวางจำนวนมาก รหัส QR จะใช้สำหรับการวางตำแหน่งที่แม่นยำ การเจาะเข้าไปในชั้นวางเพื่อการบรรจุและการจัดการ การนำทาง Laser SLAM ใช้ในฉากคงที่ ซึ่งไม่จำกัดด้วยโค้ด QR ภาคพื้นดิน และสามารถทำงานได้อย่างอิสระ

การวางตำแหน่งที่แม่นยำ

เร็ว

อายุการใช้งานยาวนาน

อัตราความล้มเหลวต่ำ

ลดแรงงาน

โทรคมนาคม
| โหมดการนำทาง | เลเซอร์สแลมและการนำทาง QR |
| โหมดขับเคลื่อน | เฟืองท้ายสองล้อ |
| L*W*H | 996 มม.*646 มม.*269 มม |
| รัศมีวงเลี้ยว | 550มม |
| น้ำหนัก | ประมาณ 130 กก |
| รัตติกาล กำลังโหลด | 100กก |
| การกวาดล้างดิน | 32มม |
| ขนาดแผ่นแม่แรง | ขวา=200มม |
| ความสูงแม่แรงสูงสุด | 60มม |
| พารามิเตอร์ประสิทธิภาพ | |
| ความสามารถในการจราจร | ความชัน ≤3% |
| ความแม่นยำทางจลนศาสตร์ | ±10 มม |
| ความเร็วในการล่องเรือ | 1 ม./วินาที (≤1.2 ม./วินาที) |
| พารามิเตอร์แบตเตอรี่ | |
| ความจุของแบตเตอรี่ | 24A·H |
| ระยะเวลาดำเนินการต่อเนื่อง | ≥8H |
| วิธีการชาร์จ | คู่มือ, อัตโนมัติ |
| อุปกรณ์เฉพาะ | |
| เรดาร์เลเซอร์ |
|
|
|
|
| ปุ่มหยุดฉุกเฉิน |
|
| วิทยากร |
|
| โคมไฟบรรยากาศ |
|
| แถบป้องกันการชนกัน |
|

คุณสมบัติหกประการของ BRTAGV12010A:
1. ขับเคลื่อนอัตโนมัติ: หุ่นยนต์นำทางอัตโนมัติขั้นสูงติดตั้งเซ็นเซอร์และระบบนำทางที่ช่วยให้หุ่นยนต์ทำงานได้อย่างอิสระจากการควบคุมโดยตรงของมนุษย์
2. ความยืดหยุ่น: AGV สามารถนำทางบนถนนปกติได้อย่างง่ายดายและสลับไปยังเส้นทางอื่นได้ตามต้องการ
3. ประสิทธิภาพ: AGV สามารถลดต้นทุนการขนส่งในขณะที่ยังปรับปรุงความแม่นยำในการจัดส่งอีกด้วย
4. ความปลอดภัย: AGV ได้รับการติดตั้งอุปกรณ์ป้องกันความปลอดภัยเพื่อป้องกันการชนและรักษาความปลอดภัยของมนุษย์และเครื่องจักรอื่นๆ
5. ความสอดคล้อง: AGV อาจได้รับการฝึกอบรมให้ทำหน้าที่ตามที่กำหนดอย่างสม่ำเสมอ
6. ใช้พลังงานจากแบตเตอรี่: AGV ใช้เทคโนโลยีแบตเตอรี่แบบชาร์จไฟได้ ทำให้สามารถทำงานได้นานกว่าเครื่องจักรทั่วไป
การบำรุงรักษาอุปกรณ์ของหุ่นยนต์นำทางอัตโนมัติขั้นสูง:
1. ควรตรวจสอบเปลือกและวงล้อสากลของหุ่นยนต์นำทางอัตโนมัติขั้นสูงเดือนละครั้ง และควรตรวจสอบเลเซอร์สัปดาห์ละครั้ง ทุกๆ สามเดือน ป้ายความปลอดภัยและปุ่มต่างๆ จะต้องผ่านการทดสอบ
2. เนื่องจากล้อขับเคลื่อนและล้ออเนกประสงค์ของหุ่นยนต์เป็นโพลียูรีเทน จึงทิ้งร่องรอยไว้บนพื้นหลังจากใช้งานเป็นเวลานาน ซึ่งจำเป็นต้องทำความสะอาดเป็นประจำ
3. ตัวหุ่นยนต์จะต้องผ่านการทำความสะอาดเป็นประจำ
4. จำเป็นต้องทำความสะอาดด้วยเลเซอร์เป็นประจำ หุ่นยนต์อาจไม่สามารถจดจำป้ายหรือชั้นวางพาเลทได้ หากเลเซอร์ไม่ได้รับการดูแลอย่างเหมาะสม นอกจากนี้ยังอาจถึงสถานะหยุดฉุกเฉินโดยไม่มีคำอธิบายที่ชัดเจน
5. AGV ที่ไม่ได้ให้บริการเป็นระยะเวลานานจะต้องจัดเก็บโดยมีมาตรการป้องกันการกัดกร่อน ปิดเครื่อง และเติมแบตเตอรี่เดือนละครั้ง
6. ต้องตรวจสอบตัวลดดาวเคราะห์ของเฟืองท้ายเพื่อการบำรุงรักษาการฉีดน้ำมันทุกๆ หกเดือน
7. สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการบำรุงรักษาอุปกรณ์ โปรดดูคู่มือผู้ใช้



-

การเรียงลำดับคลังสินค้า
-
กำลังโหลดและขนถ่าย
-
การจัดการอัตโนมัติ




ผู้รวมระบบ BORUNTE และ BORUNTE
ในระบบนิเวศของ BORUNTE BORUNTE รับผิดชอบด้านการวิจัยและพัฒนา การผลิต และการขายหุ่นยนต์และผู้ควบคุม ผู้ประกอบระบบ BORUNTE ใช้ข้อได้เปรียบทางอุตสาหกรรมหรือภาคสนามของตนเพื่อมอบการออกแบบแอปพลิเคชันเทอร์มินัล การบูรณาการ และบริการหลังการขายสำหรับผลิตภัณฑ์ BORUNTE ที่พวกเขาขาย ผู้รวมระบบ BORUNTE และ BORUNTE ปฏิบัติตามความรับผิดชอบของตนและเป็นอิสระจากกัน โดยทำงานร่วมกันเพื่อส่งเสริมอนาคตที่สดใสของ BORUNTE
- โทร:+86-400-870-8989
- NO.83 ถนน Shafu หมู่บ้านชาบู เมืองต้าหลาง เมืองตงกวน มณฑลกวางตุ้ง ประเทศจีน
- borunterobotcoltd@gmail.com



ถ้วยดูดฟองน้ำ, แกนหมุนไฟฟ้าแบบลอยตัวแบบนิวแมติก, ระบบภาพ 2 มิติ, แกนหมุนลมแบบลอยตัวแบบนิวแมติก, ตัวชดเชยตำแหน่งแรงตามแนวแกน, ตัวแยกแม่เหล็กที่ไม่ใช่,
-

วีอาร์
-

อีเมล
-

โทรศัพท์
-

วอทส์แอพพ์
-

สูงสุด