


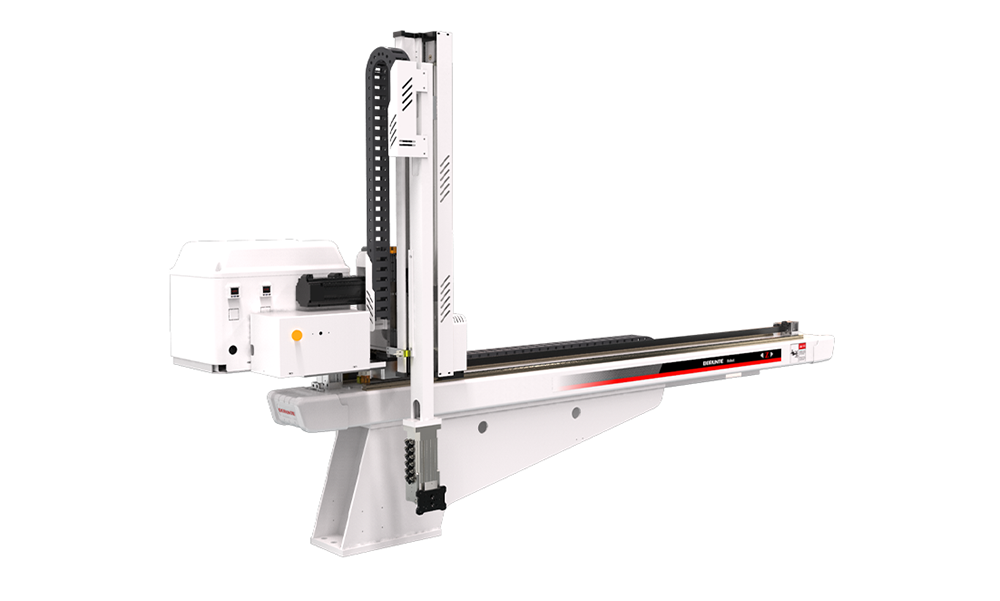
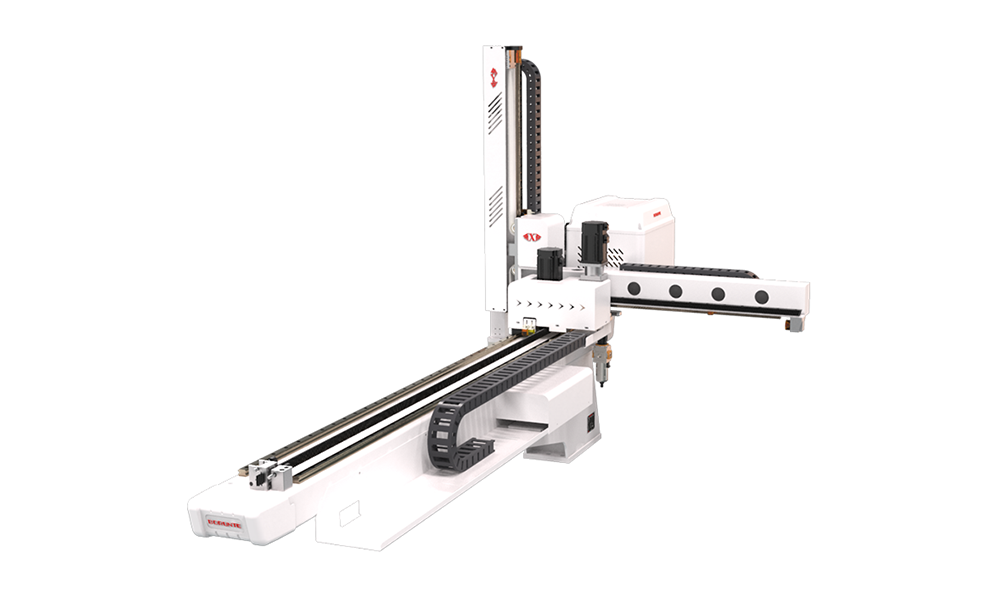
Силсилаи BRTNN11WSS3P/F ба ҳама намудҳои диапазони мошини сӯзандоруи уфуқӣ аз 250T-480T барои маҳсулоти баровардан татбиқ мешавад. Бозуи амудӣ намуди телескопӣ бо бозуи маҳсулот мебошад. Диски се меҳвари AC вақтро нисбат ба моделҳои шабеҳ, ҷойгиркунии дақиқ ва сикли кӯтоҳмуддат сарфа мекунад. Баъди гузоштани ин робот хосилнокии мехнат 10—30 фоиз зиёд мешавад, боиси кам шудани нуксонхои махсулот, таъмин намудани бехатарии операторхо, кам кардани кувваи корй ва аник назорат кардани истехсоли махсулот мегардад. Системаи ҳамгирошудаи ронандаи се меҳвар ва контроллер: хатҳои камтари сигнал, алоқаи дурдаст, иҷрои хуби васеъшавӣ, қобилияти қавии зидди дахолат, дақиқии баланди мавқеъгирии такрорӣ, метавонад ҳамзамон меҳварҳои сершумор, нигоҳдории оддии таҷҳизот ва сатҳи пасти нокомиро назорат кунад.

Ҷойгиркунии дақиқ

Тез

Муҳлати хидматрасонии дароз

Сатҳи пасти нокомӣ

Коҳиш додани меҳнат

Телекоммуникатсия
| Манбаи барқ (кВА) | Тавсияшаванда IMM (тонна) | Траверси рондашуда | Модели EOAT |
| 2.84 | 250Т-480Т | Моторҳои AC Servo | ду сока ду асбоб |
| Зарбаи траверсӣ (мм) | Зарбаи салиб (мм) | Зарбаи амудӣ (мм) | Максимум боркунӣ (кг) |
| 1700 | 3.2 | 1100 | 10 |
| Вақти хушккунӣ (сония) | Вақти давраи хушк (сония) | Истеъмоли ҳаво (NI/сикл) | Вазн (кг) |
| 1,63 | 6.15 | 3.2 | 305 |
Намоиши модел: W: Навъи телескопӣ. S: Дастаи маҳсулот. S3: Се меҳвар, ки аз ҷониби AC Servo Motor (Traverse-Mex、Вертикал-Меҳвар+Меҳвари салиб-меҳвар) ронда мешавад.
Давраи давраҳои дар боло зикршуда натиҷаҳои стандарти санҷиши дохилии ширкати мо мебошанд. Дар раванди татбиқи воқеии мошин, онҳо вобаста ба амалиёти воқеӣ фарқ мекунанд.

| A | B | C | D | E | F | G |
| 1495 | 2727 | 1100 | 513 | 1700 | / | 182.5 |
| H | I | J | K | L | M | N |
| / | / | 1001 | / | 209 | 222 | 700 |
Огоҳии дигар дода намешавад, агар мушаххасот ва намуди зоҳирӣ бо сабаби такмил ва дигар сабабҳо тағир дода шаванд. Ташаккур барои фаҳмишатон.
Манфиатҳои асосии истифодаи манипулятори се меҳвар:
1. Кормандон, вақт ва пулро сарфа кунед
2. Идоракунии қулай барои баланд бардоштани ҳосилнокӣ
3. Даромадро хеле зиёд кунанд
4. Бехтар намудани бехатарии мехнат
5. Самараи кор ва сифати махсулот баланд бардошта шавад
6. Барномасозӣ осон ва истеҳсоли баландсифат
1.During раванди амалиётӣ, як манипулятори қолаби тазриќї се меҳвари метавонад вазифаҳои автоматикунонидашуда иҷро. Он метавонад хастагии дастиро коҳиш диҳад ва дақиқиро дар муқоиса бо расмиёти дастӣ афзоиш диҳад.
2.Хароҷоти яквақта метавонад хароҷотро кам кунад. Ҳамзамон, он метавонад истеҳсолотро дар посух ба тағйироти бозор оптимизатсия кунад, ба бозор зуд мутобиқ шавад ва ба ширкатҳо имкон диҳад, ки ба бозор зуд мутобиқ шаванд.
3.Насб кардани бозуи роботии се меҳвар метавонад иқтидори истеҳсолиро (20%-30%) афзоиш диҳад, сатҳи нокомии маҳсулотро паст кунад, бехатарии операторро нигоҳ дорад, қувваи корӣ ба ҳадди ақал расонад, ҳаҷми истеҳсолро дуруст идора кунад ва партовҳоро нест кунад.
1.Он мумкин аст дар якҷоягӣ бо мошинҳои автоматии оббурӣ ва дар мошинҳои қолабӣ барои автоматикӣ дар қолаб истифода бурда мешавад.
2. Он инчунин метавонад дар якҷоягӣ бо таҷҳизоти автоматии боркунӣ ва борфарорӣ дар бахши сахтафзор барои боркунӣ ва борфарорӣ истифода шавад.
3. Хулоса, манипулятори се меҳвар барои баровардани маҳсулоти тазриқии қолаб, аз қабили асбобҳои маишӣ, лавозимоти мошин, лавозимоти мотосикл, лавозимоти LED (фонарҳо), лавозимоти компютерӣ, лавозимоти алоқа (телефонҳои мобилӣ, планшетҳо) ва гуногун асбобҳо ва ҳисобкунакҳо, электроника (сигорҳои электронӣ), истеҳсоли фишангҳо (фишангҳо), саноати соатҳо (гипусҳои соат) ва ғайра.

-

Мошинсозии сӯзандору
Категорияҳои маҳсулот
-

Манипулятори сӯзандоруи чор меҳвари серво BR...
-

Дасти манипулятори панҷ меҳвари дарозии зарбаи амудӣ ...
-

Панҷ меҳвари калон манипулятори тазриќї BR...
-

Бозуи манипулятор, ки бо муҳаррики AC servo BRTN30 идора мешавад ...
-

Манипулятори се меҳвари AC servo BRTNG...
-

Робот-манипулятори се меҳвари пластикии тазриқӣ ...
Интеграторҳои BORUNTE ва BORUNTE
Дар экосистемаи BORUNTE, BORUNTE барои R&D, истеҳсол ва фурӯши роботҳо ва манипуляторҳо масъул аст. Интеграторҳои BORUNTE аз бартариҳои соҳавӣ ё саҳроии худ истифода мебаранд, то тарҳрезии замимаи терминал, ҳамгироӣ ва хидматрасонии пас аз фурӯш барои маҳсулоти BORUNTE мефурӯшанд. Интеграторҳои BORUNTE ва BORUNTE масъулиятҳои дахлдори худро иҷро мекунанд ва аз ҳамдигар мустақиланд ва барои пешбурди ояндаи дурахшони BORUNTE якҷоя кор мекунанд.
- Тел:+86-400-870-8989
- NO.83, Шафу Роҳ, деҳаи Шабу, Таун Даланг, шаҳри Дунгуан, музофоти Гуандун, Чин
- borunterobotcoltd@gmail.com



Системаи визуалии 2D, Тақсимкунандаи ғайримагнитӣ, Компенсатори мавқеи қувваи меҳвар, Шпиндели электрикии пневматикии шинокунанда, Шпиндели пневматикии шинокунанда, Косаҳои исфанҷӣ,
-

vr
-

почтаи электронӣ
-

Телефон
-

Whatsapp
-

боло