BRTIRPH1210A är en sexaxlig robot utvecklad av BORUNTE för svets-, gradnings- och slipapplikationsindustrin. Den är kompakt till formen, liten i storleken, lätt i vikt, med en maximal belastning på 10 kg och en armspann på 1225 mm. Dess handled har en ihålig struktur, vilket gör kabeldragningen mer bekväm och rörelsen mer flexibel. De första, andra och tredje lederna är alla utrustade med högprecisionsreducerare, och de fjärde, femte och sjätte lederna är alla utrustade med högprecisionsväxelstrukturer. Den snabba foghastigheten möjliggör flexibel drift. Skyddsgraden når IP54. Dammtät och vattentät. Den repeterade positioneringsnoggrannheten är ±0,07 mm.

Exakt positionering

Snabb

Lång livslängd

Låg felfrekvens

Minska arbetskraft

Telekommunikation
| Punkt | Räckvidd | Max hastighet | ||
| Ärm | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Handled | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Armlängd (mm) | Lastförmåga (kg) | Upprepad positioneringsnoggrannhet (mm) | Strömkälla (kVA) | Vikt (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Vilka är fördelarna med att köpa professionell polerande robotarm? BORUNTE polerande industrirobotar kan förbättra produktionseffektiviteten, förbättra produktkvaliteten, minska arbetskostnader och risker för mänskliga fel, den kan arbeta i hög temperatur, skadlig gas och andra miljöer för att ge en säkrare arbetsmiljö. 2. Hur väljer man en polerande industrirobot som passar dina behov? När du väljer en robot bör följande faktorer beaktas: arbetsbelastning, arbetsyta, noggrannhetskrav, arbetshastighet, säkerhetskrav, programmering och enkelhet i drift, underhållskrav och budgetbegränsningar. Samtidigt bör samråd också genomföras med leverantörer och yrkesverksamma för att få mer detaljerade förslag. Viktiga egenskaper hos professionell polerande robotarm: 1. Precision och repeterbarhet: Poleringsarbete kräver vanligtvis mycket exakta rörelser och konsekvent drift. Industrirobotar kan positionera och styra med millimeternivånoggrannhet, vilket säkerställer konsekventa resultat i varje operation. 2. Automation och effektivitet: Ett av huvudsyften med industrirobotar är att förbättra produktionseffektiviteten. Poleringsprocessen är vanligtvis besvärlig och tidskrävande, men robotar kan utföra uppgifter på ett snabbt och konsekvent sätt och därigenom förbättra produktionslinjens totala effektivitet. 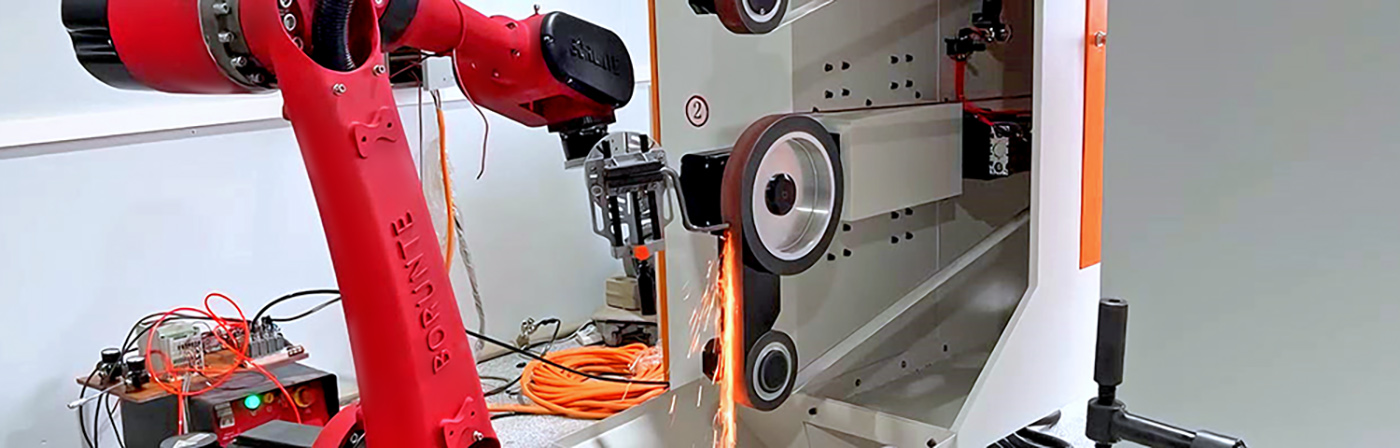  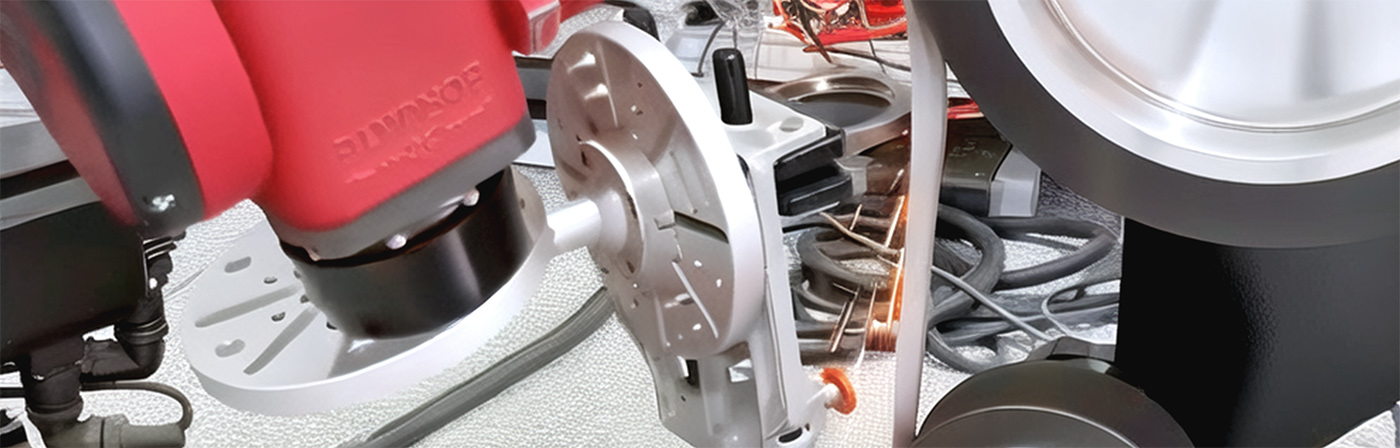 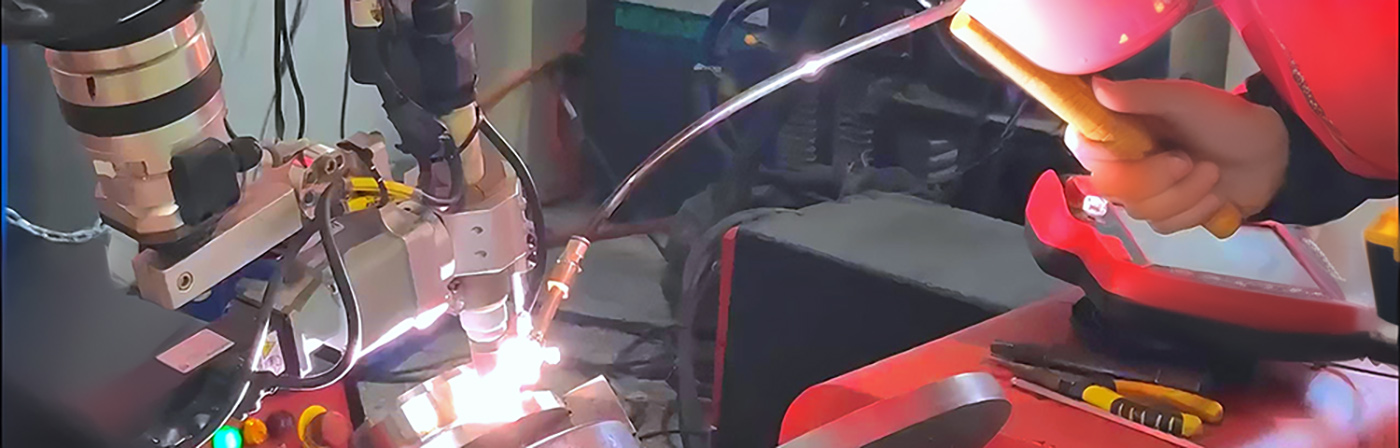
ProduktkategorierBORUNTE och BORUNTE integratörerI BORUNTEs ekosystem ansvarar BORUNTE för FoU, produktion och försäljning av robotar och manipulatorer. BORUNTE-integratörer utnyttjar sina bransch- eller fältfördelar för att tillhandahålla terminalapplikationsdesign, integration och eftermarknadsservice för BORUNTE-produkterna de säljer. BORUNTE- och BORUNTE-integratörer uppfyller sina respektive ansvarsområden och är oberoende av varandra och arbetar tillsammans för att främja BORUNTEs ljusa framtid.
© Copyright - 2010-2024 : Alla rättigheter reserverade.Webbplatskarta - AMP mobil Pneumatisk flytande pneumatisk spindel, Svamp sugkoppar, Pneumatisk flytande elektrisk spindel, Axialkraftlägeskompensator, Icke magnetisk splitter, 2D visuellt system,
|