BRTIRPH1210A je šestosni robot, ki ga je razvil BORUNTE za industrijo varjenja, odstranjevanja robov in brušenja. Je kompaktne oblike, majhne velikosti, majhne teže, z največjo obremenitvijo 10 kg in razponom rok 1225 mm. Njegovo zapestje ima votlo strukturo, zaradi česar je ožičenje bolj priročno in gibanje bolj prilagodljivo. Prvi, drugi in tretji sklep so opremljeni z visoko natančnimi reduktorji, četrti, peti in šesti sklep pa so vsi opremljeni z visoko natančnimi zobniškimi strukturami. Visoka hitrost zgloba omogoča prilagodljivo delovanje. Stopnja zaščite doseže IP54. Odporen na prah in vodo. Natančnost ponavljajočega se pozicioniranja je ±0,07 mm.

Natančno pozicioniranje

hitro

Dolga življenjska doba

Nizka stopnja napak

Zmanjšajte delo

Telekomunikacije
| Postavka | Razpon | Največja hitrost | ||
| Arm | J1 | ±165° | 164°/s | |
| J2 | -95°/+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Zapestje | J4 | ±155° | 384°/s | |
| J5 | -130°/+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Dolžina roke (mm) | Nosilnost (kg) | Ponavljajoča se natančnost pozicioniranja (mm) | Vir energije (kVA) | Teža (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Kakšne so prednosti nakupa profesionalne robotske roke za poliranje? Industrijski roboti za poliranje BORUNTE lahko izboljšajo učinkovitost proizvodnje, izboljšajo kakovost izdelkov, zmanjšajo stroške dela in tveganja človeških napak, lahko delujejo pri visoki temperaturi, škodljivih plinih in drugih okoljih, da zagotovijo varnejše delovno okolje. 2. Kako izbrati industrijskega robota za poliranje, ki ustreza vašim potrebam? Pri izbiri robota je treba upoštevati naslednje dejavnike: delovno obremenitev, delovni prostor, zahteve glede natančnosti, hitrost dela, varnostne zahteve, enostavnost programiranja in delovanja, zahteve glede vzdrževanja in proračunske omejitve. Hkrati je treba opraviti tudi posvetovanja z dobavitelji in strokovnjaki za pridobitev podrobnejših predlogov. Pomembne značilnosti profesionalne polirne robotske roke: 1. Natančnost in ponovljivost: poliranje običajno zahteva zelo natančno gibanje in dosledno delovanje. Industrijski roboti lahko pozicionirajo in nadzorujejo z milimetrsko natančnostjo, kar zagotavlja dosledne rezultate pri vsaki operaciji. 2. Avtomatizacija in učinkovitost: Eden glavnih namenov industrijskih robotov je izboljšati učinkovitost proizvodnje. Postopek poliranja je običajno okoren in dolgotrajen, vendar lahko roboti opravljajo naloge hitro in dosledno ter tako izboljšajo splošno učinkovitost proizvodne linije. 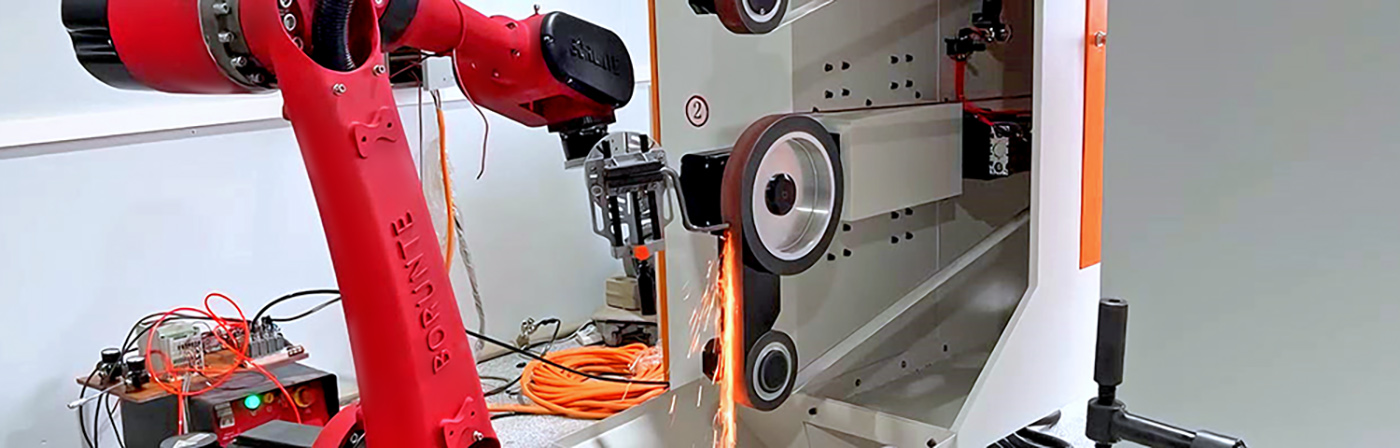  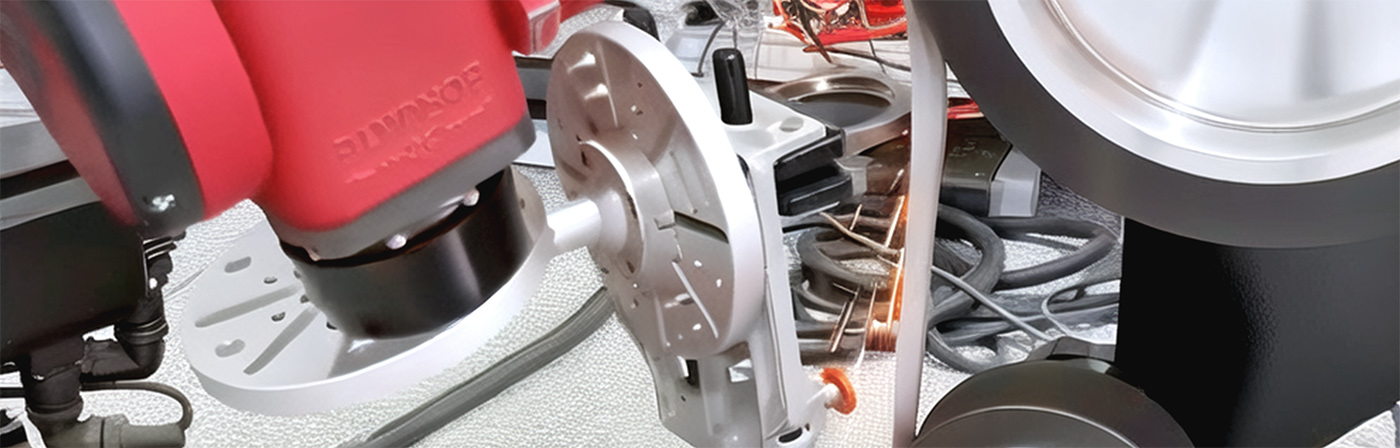 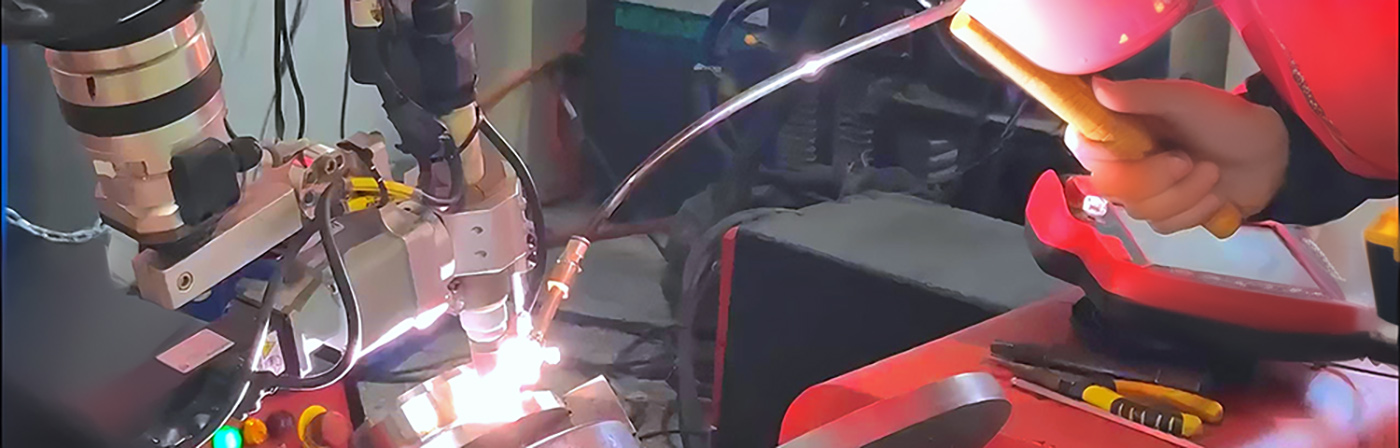
Kategorije izdelkovBORUNTE in borunte integratorjiV ekosistemu BORUNTE je BORUNTE odgovoren za raziskave in razvoj, proizvodnjo in prodajo robotov in manipulatorjev. Integratorji BORUNTE izkoriščajo svoje prednosti v panogi ali na terenu, da zagotovijo načrtovanje terminalskih aplikacij, integracijo in poprodajne storitve za izdelke BORUNTE, ki jih prodajajo. BORUNTE in borunte integratorji izpolnjujejo svoje odgovornosti in so neodvisni drug od drugega ter sodelujejo pri spodbujanju svetle prihodnosti BORUNTE.
© Copyright - 2010-2024 : Vse pravice pridržane.Zemljevid spletnega mesta - AMP Mobile Pnevmatsko lebdeče pnevmatsko vreteno, Gobasti priseski, Pnevmatsko lebdeče električno vreteno, Kompenzator položaja aksialne sile, Nemagnetni razdelilnik, 2D vizualni sistem,
|