




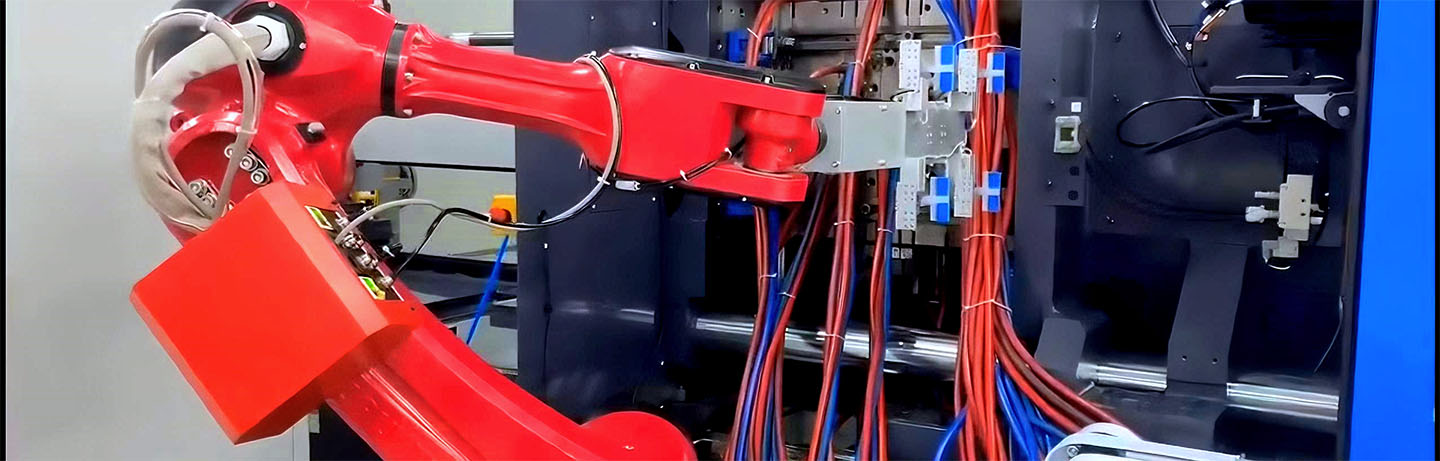
Predstavitev izdelka
Serija BRTV17WSS5PC se nanaša na vse vrste strojev za horizontalno brizganje v obsegu 600T-1300T za izdelke za ven in vreče. Njegova namestitev se razlikuje od standardnih rok manipulatorja: izdelki so nameščeni na koncu strojev za brizganje, kar prihrani prostor za namestitev. Vrsta roke: teleskopska in enojna roka, petosni servo pogon AC, z osjo servo pogona AC, kot vrtenja osi A 360°, kot vrtenja osi C 180°, kot vpenjanja je mogoče prosto namestiti in nastaviti, dolga življenjska doba, visoka natančnost, nizka stopnja napak, preprosto vzdrževanje, uporablja se predvsem za hitro odstranjevanje ali kompleksno odstranjevanje kotov, zlasti za izdelke dolge oblike, kot je npr. avtomobilov, pralnih strojev in gospodinjskih aparatov. Integriran sistem petosnega gonilnika in krmilnika: manj signalnih linij, komunikacija na dolge razdalje, dobra zmogljivost razširitve, močna zmožnost proti motnjam, visoka natančnost ponavljajočega se pozicioniranja in lahko krmili več osi hkrati.

Natančno pozicioniranje

hitro

Dolga življenjska doba

Nizka stopnja napak

Zmanjšajte delo

Telekomunikacije
Osnovni parametri
| Vir energije (KVA) | Priporočeni IMM (tona) | Prečni pogon | Model EOAT |
| 4.23 | 600T-1300T | AC servo motor | štirisesalniki dve napeljavi |
| Prečni hod (mm) | Prečni hod (mm) | Navpični hod (mm) | Max.obremenitev (kg) |
| Skupna dolžina prečnega loka:12m | ±200 | 1700 | 20 |
| Čas sušenja (s) | Čas suhega cikla (sek) | Poraba zraka (NI/cikel) | Teža (kg) |
| 5.21 | V teku | 15 | Nestandardno |
Predstavitev modela: W: Teleskopski tip. S: roka izdelka. S4: Štiri osi, ki jih poganja AC servo motor (prečna os、C-os、navpična os + prečna os)
Zgoraj omenjeni čas cikla je rezultat internega testnega standarda našega podjetja. V dejanskem postopku nanašanja stroja se razlikujejo glede na dejansko delovanje.
Grafikon poti

| A | B | C | D | E | F | G | H | I |
| 2065 | ≤12M | 1700 | 658 | v teku | / | 174.5 | / | / |
| J | K | L | M | N1 | N2 | O | P | Q |
| 1200 | / | v teku | v teku | 200 | 200 | 1597 | / | / |
Brez dodatnega obvestila, če sta specifikacija in videz spremenjena zaradi izboljšave ali drugih razlogov. Hvala za razumevanje.
Pregled in vzdrževanje mehanske roke
1. Delovni postopki
Med uporabo opreme, ko se čas delovanja povečuje, se tehnična zmogljivost različnih mehanizmov in delov postopoma slabša zaradi različnih dejavnikov, kot so trenje, korozija, obraba, vibracije, udarci, trki in nesreče.
2. Vzdrževalna opravila
Glede na naravo vzdrževalnih nalog jih lahko razdelimo na čiščenje, pregledovanje, zategovanje, mazanje, prilagajanje, pregledovanje in dobavo. Nalogo pregleda izvaja vzdrževalec naročnikove opreme ali v sodelovanju z našim tehničnim osebjem.
(1) Postopke čiščenja, pregledovanja in oskrbe običajno izvajajo operaterji opreme.
(2) Postopke zategovanja, prilagajanja in mazanja običajno izvajajo mehaniki.
(3) Elektro dela izvaja strokovno osebje.
3. Sistem vzdrževanja
Sistem vzdrževanja opreme v naši tovarni temelji na preprečevanju kot glavnem načelu, vzdrževanje pa se izvaja ob določenih delovnih urah. Razdeljeno je na redno vzdrževanje, vzdrževanje prve stopnje, vzdrževanje druge stopnje, dnevno vzdrževanje, mesečno vzdrževanje in letno vzdrževanje. Razvrstitev in vsebina del vzdrževanja opreme temeljita na spremembah tehničnih pogojev med dejansko uporabo; Struktura opreme; Pogoji uporabe; Določanje okoljskih pogojev itd. Temelji na vzorcih obrabe in staranja delov, osredotočanju projektov s podobnimi stopnjami, vzdrževanju opreme, preden se normalna obraba in staranje poškodujeta, vzdrževanju čiste, prepoznavanju in odpravljanju skritih napak, preprečevanju zgodnjih poškodb opremo in doseganje cilja vzdrževanja normalnega delovanja opreme.
-
Brizganje




BORUNTE in borunte integratorji
V ekosistemu BORUNTE je BORUNTE odgovoren za raziskave in razvoj, proizvodnjo in prodajo robotov in manipulatorjev. Integratorji BORUNTE izkoriščajo svoje prednosti v panogi ali na terenu, da zagotovijo načrtovanje terminalskih aplikacij, integracijo in poprodajne storitve za izdelke BORUNTE, ki jih prodajajo. BORUNTE in borunte integratorji izpolnjujejo svoje odgovornosti in so neodvisni drug od drugega ter sodelujejo pri spodbujanju svetle prihodnosti BORUNTE.
- Tel: +86-400-870-8989
- NO.83, cesta Shafu, vas Shabu, mesto Dalang, mesto Dongguan, provinca Guangdong, Kitajska
- borunterobotcoltd@gmail.com



Pnevmatsko lebdeče pnevmatsko vreteno, Gobasti priseski, Nemagnetni razdelilnik, Kompenzator položaja aksialne sile, 2D vizualni sistem, Pnevmatsko lebdeče električno vreteno,
-

vr
-

e-pošta
-

Telefon
-

WhatsApp
-

Vrh