BRTIRPH1210A යනු වෑල්ඩින්, ඩිබර් කිරීම සහ ඇඹරුම් යෙදුම් කර්මාන්ත සඳහා BORUNTE විසින් සංවර්ධනය කරන ලද හය-අක්ෂ රොබෝවකි. එය සංයුක්ත හැඩය, කුඩා ප්රමාණය, සැහැල්ලු බර, උපරිම බර කිලෝ ග්රෑම් 10 ක් සහ 1225 මි.මී. එහි මැණික් කටුව හිස් ව්යුහයක් අනුගමනය කරයි, එමඟින් රැහැන් වඩාත් පහසු වන අතර චලනය වඩාත් නම්යශීලී වේ. පළමු, දෙවන සහ තෙවන සන්ධි සියල්ලම ඉහළ නිරවද්යතාවයකින් අඩු කරන්නන්ගෙන් සමන්විත වන අතර හතරවන, පස්වන සහ හයවන සන්ධි සියල්ලම ඉහළ නිරවද්ය ගියර් ව්යුහයන්ගෙන් සමන්විත වේ. අධිවේගී සන්ධි වේගය නම්යශීලී ක්රියාකාරිත්වය සක්රීය කරයි. ආරක්ෂණ ශ්රේණිය IP54 වෙත ළඟා වේ. දූවිලි ආරක්ෂිත සහ ජල ආරක්ෂිත. නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය ± 0.07mm වේ.

නිවැරදි ස්ථානගත කිරීම

වේගවත්

දිගු සේවා කාලය

අඩු අසාර්ථක අනුපාතය

ශ්රමය අඩු කරන්න

විදුලි සංදේශ
| අයිතමය | පරාසය | උපරිම වේගය | ||
| හස්තය | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| මැණික් කටුව | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| අත් දිග (මි.මී.) | පැටවීමේ හැකියාව (kg) | නැවත නැවත ස්ථානගත කිරීමේ නිරවද්යතාවය (මි.මී.) | බලශක්ති ප්රභවය (kVA) | බර (කිලෝ) |
| 1225 | 10 | ± 0.07 | 4.30 | 155  1. වෘත්තීය ඔප දැමීමේ රොබෝ අතක් මිලදී ගැනීමේ ප්රතිලාභ මොනවාද? BORUNTE ඔප දැමීමේ කාර්මික රොබෝවරුන්ට නිෂ්පාදන කාර්යක්ෂමතාව වැඩි දියුණු කිරීමට, නිෂ්පාදන ගුණාත්මක භාවය වැඩි දියුණු කිරීමට, ශ්රම පිරිවැය සහ මානව දෝෂ අවදානම අඩු කිරීමට, ආරක්ෂිත වැඩ පරිසරයක් සැපයීම සඳහා ඉහළ උෂ්ණත්වය, හානිකර වායු සහ වෙනත් පරිසරයන් තුළ ක්රියා කළ හැකිය. 2. ඔබේ අවශ්යතාවයට ගැලපෙන ඔප දැමීමේ කාර්මික රොබෝවක් තෝරා ගන්නේ කෙසේද? රොබෝවක් තෝරාගැනීමේදී, පහත සඳහන් සාධක සලකා බැලිය යුතුය: වැඩ බර, වැඩබිම, නිරවද්යතා අවශ්යතා, වැඩ කිරීමේ වේගය, ආරක්ෂක අවශ්යතා, ක්රමලේඛන සහ මෙහෙයුම් සරල බව, නඩත්තු අවශ්යතා සහ අයවැය සීමාවන්. ඒ අතරම, වඩාත් සවිස්තරාත්මක යෝජනා ලබා ගැනීම සඳහා සැපයුම්කරුවන් සහ වෘත්තිකයන් සමඟ උපදේශන ද පැවැත්විය යුතුය. වෘත්තීය ඔප දැමීමේ රොබෝ අතෙහි සැලකිය යුතු ලක්ෂණ: 1. නිරවද්යතාවය සහ පුනරාවර්තන හැකියාව: ඔප දැමීමේ කාර්යය සඳහා සාමාන්යයෙන් ඉතා නිරවද්ය චලනය සහ ස්ථාවර ක්රියාකාරිත්වය අවශ්ය වේ. කාර්මික රොබෝවරුන්ට මිලිමීටර මට්ටමේ නිරවද්යතාවයකින් ස්ථානගත කිරීමට සහ පාලනය කිරීමට හැකි අතර, සෑම මෙහෙයුමකදීම ස්ථාවර ප්රතිඵල සහතික කරයි. 2. ස්වයංක්රීයකරණය සහ කාර්යක්ෂමතාව: කාර්මික රොබෝවරුන්ගේ ප්රධාන අරමුණක් වන්නේ නිෂ්පාදන කාර්යක්ෂමතාව වැඩි දියුණු කිරීමයි. ඔප දැමීමේ ක්රියාවලිය සාමාන්යයෙන් අපහසු සහ කාලය ගතවන නමුත් රොබෝවරුන්ට වේගවත් හා ස්ථාවර ආකාරයකින් කාර්යයන් ඉටු කළ හැකි අතර එමඟින් නිෂ්පාදන රේඛාවේ සමස්ත කාර්යක්ෂමතාව වැඩි දියුණු කළ හැකිය. 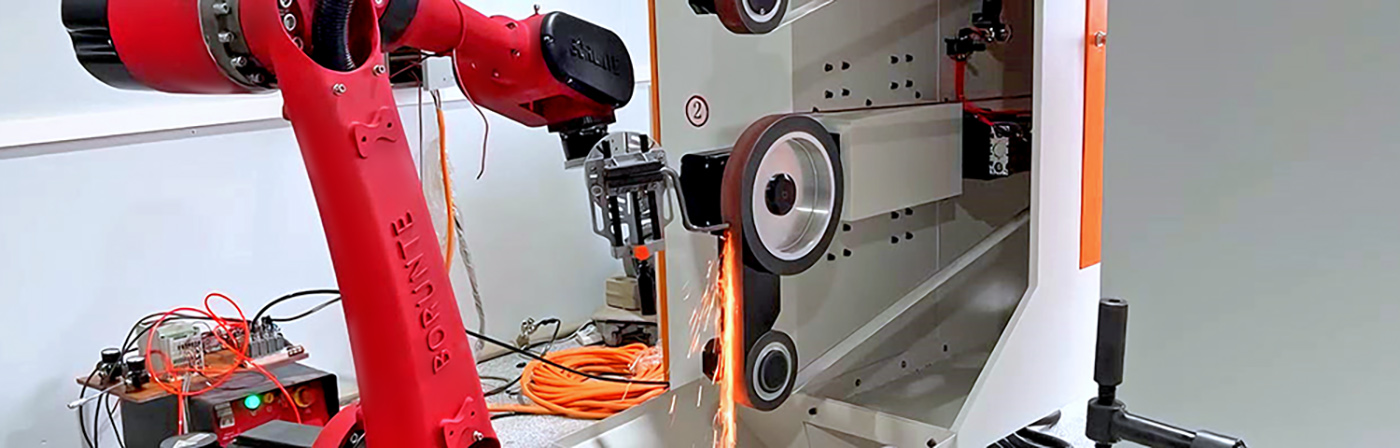  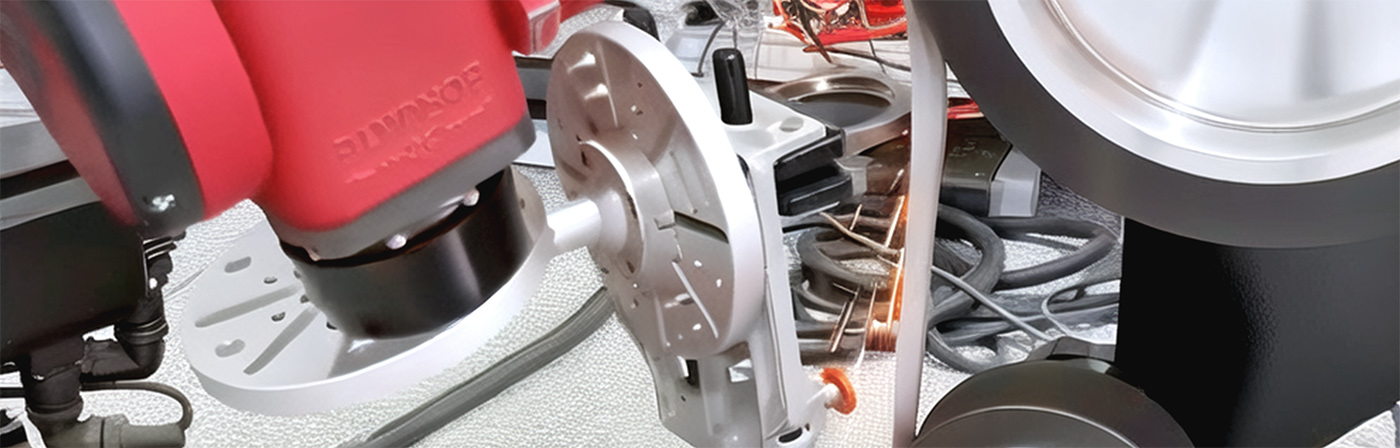 
නිෂ්පාදන කාණ්ඩBORUNTE සහ BORUNTE ඒකාබද්ධ කරන්නන්BORUNTE පරිසර පද්ධතිය තුළ, BORUNTE විසින් රොබෝවරුන් සහ උපාමාරු කරන්නන්ගේ R&D, නිෂ්පාදනය සහ අලෙවිය සඳහා වගකීම දරයි. BORUNTE ඒකාබද්ධ කරන්නන් ඔවුන් අලෙවි කරන BORUNTE නිෂ්පාදන සඳහා පර්යන්ත යෙදුම් නිර්මාණය, ඒකාබද්ධ කිරීම සහ අලෙවියෙන් පසු සේවාව සැපයීම සඳහා ඔවුන්ගේ කර්මාන්ත හෝ ක්ෂේත්ර වාසි භාවිතා කරයි. BORUNTE සහ BORUNTE ඒකාබද්ධ කරන්නන් ඔවුන්ගේ වගකීම් ඉටු කරන අතර එකිනෙකාගෙන් ස්වාධීන වන අතර, BORUNTE හි දීප්තිමත් අනාගතය ප්රවර්ධනය කිරීමට එක්ව කටයුතු කරයි.
© ප්රකාශන හිමිකම - 2010-2024 : සියලුම හිමිකම් ඇවිරිණි.අඩවි සිතියම - AMP ජංගම වායුමය පාවෙන වායුමය ස්පින්ඩලය, ස්පොන්ජ් චූෂණ කෝප්ප, වායුමය පාවෙන විදුලි ස්පින්ඩලය, අක්ෂීය බල පිහිටුම් වන්දිය, චුම්බක නොවන බෙදුම්කරු, 2D දෘශ්ය පද්ධතිය,
|