
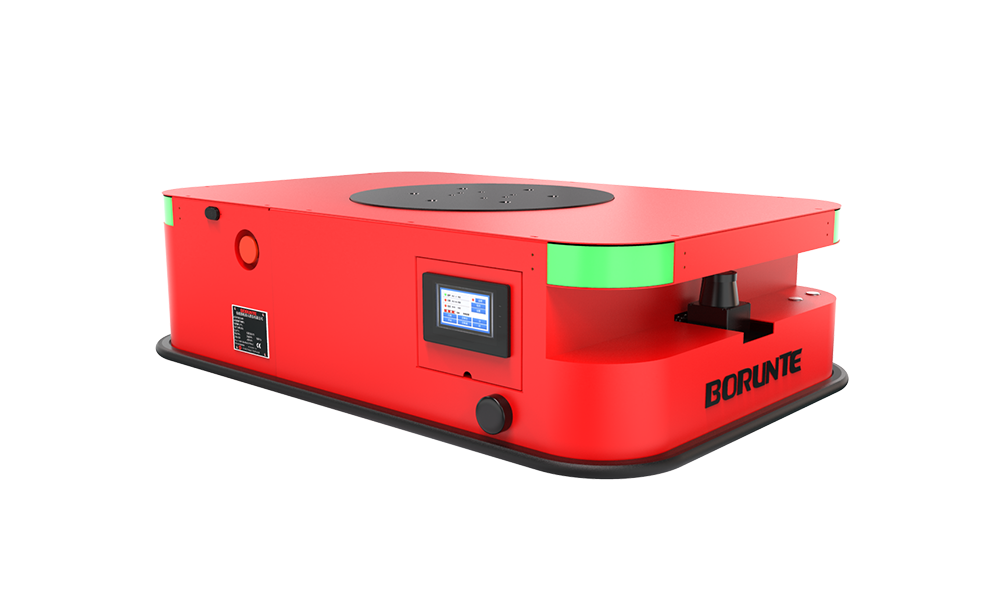



BRTAGV12010A යනු කිලෝග්රෑම් 100ක බරක් සහිත QR කේත සංචාලනය සහිත ලේසර් SLAM භාවිතා කරන සැඟවී සිටින ජැක්-අප් ප්රවාහන රොබෝවෙකි. බහු දර්ශන සහ විවිධ නිරවද්යතා අවශ්යතා සපුරාලීම සඳහා ලේසර් SLAM සහ QR කේත සංචාලනය නිදහසේ මාරු කළ හැකිය. බොහෝ රාක්ක සහිත සංකීර්ණ දර්ශනවලදී, QR කේතය නිවැරදිව ස්ථානගත කිරීම, ඇසුරුම් කිරීම සහ හැසිරවීම සඳහා රාක්ක තුළට විදීම සඳහා භාවිතා වේ. ලේසර් SLAM සංචලනය ස්ථාවර දර්ශනවල භාවිතා වේ, එය බිම් QR කේතයෙන් සීමා නොවන අතර නිදහසේ ක්රියා කළ හැකිය.

නිවැරදි ස්ථානගත කිරීම

වේගවත්

දිගු සේවා කාලය

අඩු අසාර්ථක අනුපාතය

ශ්රමය අඩු කරන්න

විදුලි සංදේශ
| සංචාලන මාදිලිය | ලේසර් SLAM සහ QR සංචලනය |
| ධාවන මාදිලිය | රෝද දෙකේ අවකලනය |
| L*W*H | 996mm*646mm*269mm |
| හැරවුම් අරය | 550 මි.මී |
| බර | කිලෝ ග්රෑම් 130 ක් පමණ |
| Ratrd පැටවීම | 100kg |
| බිම් නිෂ්කාශනය | 32 මි.මී |
| ජැකිං තහඩු ප්රමාණය | R=200mm |
| උපරිම ජැක් උස | 60 මි.මී |
| කාර්ය සාධන පරාමිතීන් | |
| ගමනාගමනය | ≤3% බෑවුම |
| චාලක නිරවද්යතාව | ± 10 මි.මී |
| කෲස් වේගය | 1 m/s (≤1.2m/s) |
| බැටරි පරාමිතීන් | |
| බැටරි ධාරිතාව | 24A·H |
| අඛණ්ඩ ධාවන කාලය | ≥8H |
| ආරෝපණ ක්රමය | අත්පොත, ස්වයංක්රීය |
| විශේෂිත උපකරණ | |
| ලේසර් රේඩාර් | ✓ |
|
|
|
| හදිසි නැවතුම් බොත්තම | ✓ |
| කථානායක | ✓ |
| වායුගෝලයේ ලාම්පුව | ✓ |
| ප්රති-ගැටුම් තීරුව | ✓ |

BRTAGV12010A හි විශේෂාංග හයක්:
1. ස්වයංක්රීය: උසස් ස්වයංක්රීය මාර්ගෝපදේශක රොබෝවක් සෘජු මිනිස් පාලනයෙන් ස්වාධීනව ක්රියා කිරීමට ඉඩ සලසන සංවේදක සහ සංචාලන පද්ධති වලින් සැරසී ඇත.
2. නම්යශීලී බව: AGV හට සාමාන්ය මාර්ගවල පහසුවෙන් සැරිසැරීමට මෙන්ම අවශ්ය පරිදි වෙනත් මාර්ගවලට මාරු විය හැක.
3. කාර්යක්ෂමතාව: AGV ප්රවාහන වියදම් අඩු කරන අතරම බෙදා හැරීමේ නිරවද්යතාවයද වැඩි දියුණු කරයි.
4. ආරක්ෂාව: AGV ඝට්ටන වැළැක්වීමට සහ මිනිසුන්ගේ සහ අනෙකුත් යන්ත්රවල ආරක්ෂාව ආරක්ෂා කිරීමට ආරක්ෂිත ආරක්ෂණ උපාංගවලින් සැරසී ඇත.
5. අනුකූලතාව: නිශ්චිත රාජකාරි නිරතුරුව කිරීමට AGV පුහුණු කළ හැක.
6. බැටරි බලය: AGV නැවත ආරෝපණය කළ හැකි බැටරි තාක්ෂණය භාවිතා කරයි, සාම්ප්රදායික යන්ත්රවලට වඩා දිගු කාලයක් ක්රියා කිරීමට ඉඩ සලසයි.
උසස් ස්වයංක්රීය මාර්ගෝපදේශක රොබෝ යන්ත්ර නඩත්තු කිරීම:
1. උසස් ස්වයංක්රීය මාර්ගෝපදේශ රොබෝවරයාගේ කවචය සහ විශ්වීය රෝදය මසකට වරක් පරීක්ෂා කළ යුතු අතර, ලේසර් සතියකට වරක් පරීක්ෂා කළ යුතුය. සෑම මාස තුනකට වරක්, ආරක්ෂිත ලේබල් සහ බොත්තම් පරීක්ෂණයකින් සමත් විය යුතුය.
2. රොබෝවරයාගේ රියදුරු රෝදය සහ විශ්වීය රෝදය පොලියුරේටීන් නිසා, ඒවා දිගුකාලීන භාවිතයෙන් පසු බිම මත සලකුණු තබනු ඇත, නිතිපතා පිරිසිදු කිරීම අවශ්ය වේ.
3. රොබෝ ශරීරය නිතිපතා පිරිසිදු කිරීම සිදු කළ යුතුය.
4. නිතිපතා ලේසර් පිරිසිදු කිරීම අවශ්ය වේ. ලේසර් නිසි ලෙස නඩත්තු නොකළහොත් රොබෝවරයාට සංඥා හෝ පැලට් රාක්ක හඳුනා ගැනීමට නොහැකි විය හැකිය; එය පැහැදිලි පැහැදිලි කිරීමකින් තොරව හදිසි නැවතුම් තත්ත්වයකට ද ළඟා විය හැකිය.
5. දිගු කාලයක් සේවයෙන් ඉවත්ව ඇති AGV විඛාදන විරෝධී පියවර සමඟ ගබඩා කර, නිවා දැමිය යුතු අතර, බැටරිය මසකට වරක් නැවත පිරවිය යුතුය.
6. සෑම මාස හයකට වරක් තෙල් එන්නත් නඩත්තු කිරීම සඳහා අවකල ගියර් ග්රහලෝක අඩු කරන්නා පරීක්ෂා කළ යුතුය.
7. උපකරණ නඩත්තු කිරීම පිළිබඳ වැඩිදුර තොරතුරු සඳහා, පරිශීලක මාර්ගෝපදේශය බලන්න.



-

ගබඩා වර්ග කිරීම
-
පැටවීම සහ බෑම
-
ස්වයංක්රීය හැසිරවීම




BORUNTE සහ BORUNTE ඒකාබද්ධ කරන්නන්
BORUNTE පරිසර පද්ධතිය තුළ, BORUNTE විසින් රොබෝවරුන් සහ උපාමාරු කරන්නන්ගේ R&D, නිෂ්පාදනය සහ අලෙවිය සඳහා වගකීම දරයි. BORUNTE ඒකාබද්ධ කරන්නන් ඔවුන් අලෙවි කරන BORUNTE නිෂ්පාදන සඳහා පර්යන්ත යෙදුම් නිර්මාණය, ඒකාබද්ධ කිරීම සහ අලෙවියෙන් පසු සේවාව සැපයීම සඳහා ඔවුන්ගේ කර්මාන්ත හෝ ක්ෂේත්ර වාසි භාවිතා කරයි. BORUNTE සහ BORUNTE ඒකාබද්ධ කරන්නන් ඔවුන්ගේ වගකීම් ඉටු කරන අතර එකිනෙකාගෙන් ස්වාධීන වන අතර, BORUNTE හි දීප්තිමත් අනාගතය ප්රවර්ධනය කිරීමට එක්ව කටයුතු කරයි.
- දුරකථන:+86-400-870-8989
- NO.83, Shafu පාර, Shabu Village, Dalang Town, Dongguan City, Guangdong පළාත, චීනය
- borunterobotcoltd@gmail.com



ස්පොන්ජ් චූෂණ කෝප්ප, වායුමය පාවෙන විදුලි ස්පින්ඩලය, 2D දෘශ්ය පද්ධතිය, වායුමය පාවෙන වායුමය ස්පින්ඩලය, අක්ෂීය බල පිහිටුම් වන්දිය, චුම්බක නොවන බෙදුම්කරු,
-

vr
-

ඊමේල්
-

දුරකථනය
-

Whatsapp
-

ඉහළ