



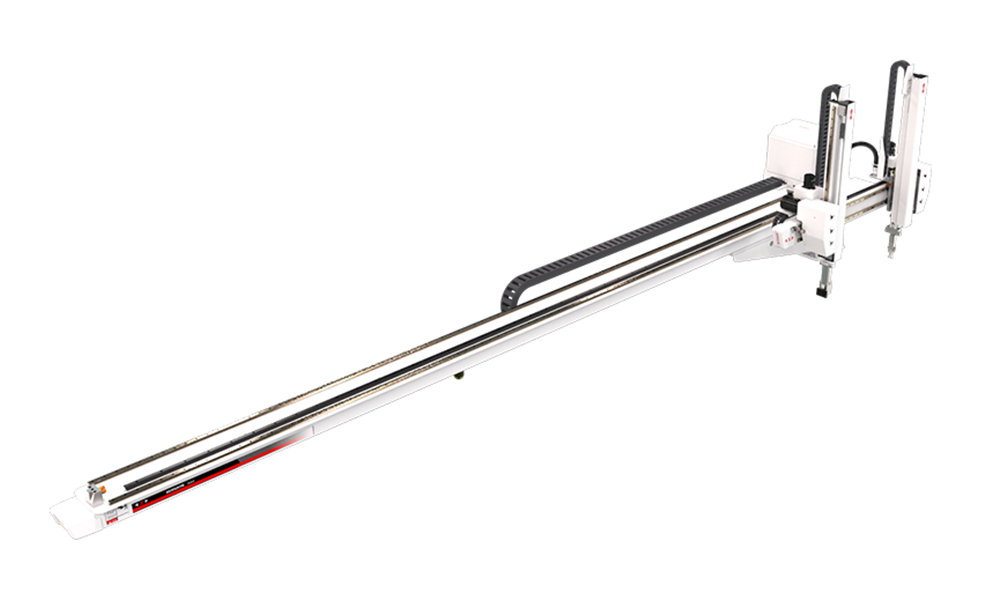
A série BRTV13WDS5P0/F0 aplica-se a todos os tipos de máquinas injetoras horizontais de 320T-700T para produtos retirados e sprue. A instalação é diferente dos robôs de viga tradicionais, os produtos são colocados na extremidade das máquinas injetoras. Possui braço duplo. O braço vertical é um estágio telescópico e o curso vertical é de 1300 mm. Servo acionamento CA de cinco eixos. Após a instalação, o espaço de instalação do ejetor pode ser economizado em 30-40%, e a planta pode ser utilizada de forma mais completa, permitindo uma melhor utilização do espaço de produção, a produtividade aumentará em 20-30%, reduzirá a taxa de defeitos, garantirá o segurança dos operadores, reduza a mão de obra e controle com precisão a produção para reduzir o desperdício. Sistema integrado de driver e controlador de cinco eixos: menos linhas de sinal, comunicação de longa distância, bom desempenho de expansão, forte capacidade anti-interferência, alta precisão de posicionamento repetido, pode controlar simultaneamente vários eixos, manutenção simples de equipamentos e baixa taxa de falhas.

Posicionamento preciso

Rápido

Longa vida útil

Baixa taxa de falhas

Reduzir o trabalho

Telecomunicação
| Fonte de energia (kVA) | IMM recomendado (tonelada) | Acionado por travessia | Modelo de EOAT |
| 3h40 | 320T-700T | Servo motor CA | duas sucções duas luminárias |
| Curso transversal (mm) | Curso transversal (mm) | Curso vertical (mm) | Carga máxima (kg) |
| Arco horizontal com comprimento total inferior a 6 metros | pendente | 1300 | 8 |
| Tempo de retirada a seco (seg) | Tempo de ciclo seco (seg) | Consumo de Ar (NI/ciclo) | Peso (kg) |
| 2.3 | pendente | 9 | Fora do padrão |
Representação do modelo: W:Tipo telescópico. D: Braço do produto + braço do corredor. S5: Cinco eixos acionados por servo motor CA (eixo transversal, eixo vertical + eixo transversal).
O tempo de ciclo mencionado acima é o resultado do padrão de teste interno da nossa empresa. No processo de aplicação real da máquina, eles irão variar de acordo com a operação real.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | pendente | pendente | pendente | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | pendente | pendente | 253,5 | 399 | pendente | 549 | pendente |
| Q | |||||||
| 1300 | |||||||
Nenhum aviso adicional se as especificações e a aparência forem alteradas devido a melhorias e outros motivos. Obrigado pela sua compreensão.

1. Mudança de estado
O pingente de ensino do braço manipulador de moldagem por injeção de plástico tem três status: Manual, Parada e Automático. [Manual]: Para entrar no modo Manual, mova a chave de estado para a esquerda. [Stop]: Para entrar no estado Stop, mova a chave de estado para o centro. Os parâmetros podem ser definidos nesta fase. [Auto]: Para entrar no estado Automático, mova a chave de estado para o centro. Configurações automáticas e correspondentes podem ser realizadas nesta condição.
2. Botões de função
Botão [Iniciar]:
Função 1: No modo Auto, pressione “Iniciar” para iniciar o manipulador automaticamente.
Função 2: No estado Stop, pressione "Origin" e depois "Start" para restaurar o manipulador à origem.
Função 3: No estado Stop, pressione "HP" e depois "Start" para redefinir a origem do manipulador.
Botão [Parar]:
Função 1: No modo Auto, pressione “Stop” e a aplicação irá parar quando o módulo terminar. Função 2: Quando ocorrer um alerta, toque em "Parar" no modo Automático para apagar a exibição do alarme resolvido.
Botão [Origem]: É aplicável apenas a ações de retorno. Consulte a Seção 2.2.4 "Método de retorno".
Botão [HP]: Pressione "HP" e depois "Iniciar, todos os eixos serão redefinidos na ordem Y1, Y2 Z, X1 e X2, Y1 e Y2 retornarão a 0 e Z, X1 e X2 retornarão ao início posição do programa.
Botão [Aumentar/Diminuir velocidade]: Esses dois botões podem ser usados para ajustar a velocidade global no estado Manual e Automático.
Botão [Parada de Emergência]: Em uma emergência, pressionar o botão "Parada de Emergência" desligará todos os eixos e soará o alerta de "Parada de Emergência". Após retirar o botão, pressione a tecla “Stop” para silenciar o alarme.

-

Moldagem por injeção
Categorias de produtos
-
Servomanipulador de alta precisão de cinco eixos BRTV0...
-

Robô de injeção de moldagem industrial linear BRTR0...
-

Manipulador de alta velocidade para injeção de moldes BRTR0...
-

Manipulador industrial servo linear AC BRTR09WD...
-

Manipulador de servo injeção AC de cinco eixos BRTR13...
-

Manipulador de robô cartesiano de alta velocidade BRTR17WD...
Integradores BORUNTE e BORUNTE
No ecossistema BORUNTE, a BORUNTE é responsável pela pesquisa e desenvolvimento, produção e vendas de robôs e manipuladores. Os integradores BORUNTE utilizam suas vantagens industriais ou de campo para fornecer design de aplicativos de terminal, integração e serviço pós-venda para os produtos BORUNTE que vendem. Os integradores BORUNTE e BORUNTE cumprem as suas respetivas responsabilidades e são independentes entre si, trabalhando em conjunto para promover o futuro brilhante da BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, vila de Shabu, cidade de Dalang, cidade de Dongguan, província de Guangdong, China
- borunterobotcoltd@gmail.com



Ventosas de esponja, Sistema visual 2D, Compensador de posição de força axial, Eixo pneumático flutuante pneumático, Fuso elétrico flutuante pneumático, Divisor não magnético,
-

realidade virtual
-

e-mail
-

Telefone
-

Whatsapp
-

Principal