BRTIRPH1210A to sześcioosiowy robot opracowany przez firmę BORUNTE do zastosowań w branży spawania, gratowania i szlifowania. Ma kompaktowy kształt, mały rozmiar, niewielką wagę, maksymalne obciążenie 10 kg i rozpiętość ramion 1225 mm. Nadgarstek ma pustą strukturę, dzięki czemu okablowanie jest wygodniejsze, a ruch bardziej elastyczny. Wszystkie przeguby pierwszy, drugi i trzeci są wyposażone w reduktory o wysokiej precyzji, a przeguby czwarty, piąty i szósty są wyposażone w konstrukcje przekładni o wysokiej precyzji. Duża prędkość przegubu umożliwia elastyczną pracę. Stopień ochrony osiąga IP54. Odporny na kurz i wodę. Dokładność powtarzania pozycjonowania wynosi ±0,07 mm.

Dokładne pozycjonowanie

Szybko

Długa żywotność

Niski wskaźnik awaryjności

Zmniejsz siłę roboczą

Telekomunikacja
| Przedmiot | Zakres | Maksymalna prędkość | ||
| Ramię | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Nadgarstek | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Długość ramienia (mm) | Możliwość ładowania (kg) | Powtarzalna dokładność pozycjonowania (mm) | Źródło zasilania (kVA) | Waga (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Jakie są korzyści z zakupu profesjonalnego ramienia robota polerskiego? Roboty przemysłowe do polerowania BORUNTE mogą poprawić wydajność produkcji, poprawić jakość produktu, zmniejszyć koszty pracy i ryzyko błędów ludzkich, mogą pracować w wysokiej temperaturze, szkodliwych gazach i innych środowiskach, aby zapewnić bezpieczniejsze środowisko pracy. 2. Jak wybrać robota przemysłowego polerskiego odpowiadającego Twoim potrzebom? Wybierając robota, należy wziąć pod uwagę następujące czynniki: obciążenie pracą, przestrzeń roboczą, wymagania dotyczące dokładności, prędkość roboczą, wymagania bezpieczeństwa, prostotę programowania i obsługi, wymagania konserwacyjne i ograniczenia budżetowe. Jednocześnie należy przeprowadzić konsultacje z dostawcami i specjalistami w celu uzyskania bardziej szczegółowych sugestii. Istotne cechy profesjonalnego ramienia robota polerskiego: 1. Precyzja i powtarzalność: Prace polerskie zazwyczaj wymagają bardzo precyzyjnego ruchu i konsekwentnej pracy. Roboty przemysłowe mogą pozycjonować i sterować z dokładnością do milimetra, zapewniając spójne wyniki w każdej operacji. 2. Automatyzacja i wydajność: Jednym z głównych celów robotów przemysłowych jest poprawa wydajności produkcji. Proces polerowania jest zazwyczaj uciążliwy i czasochłonny, jednak roboty mogą wykonywać zadania w sposób szybki i spójny, poprawiając tym samym ogólną wydajność linii produkcyjnej. 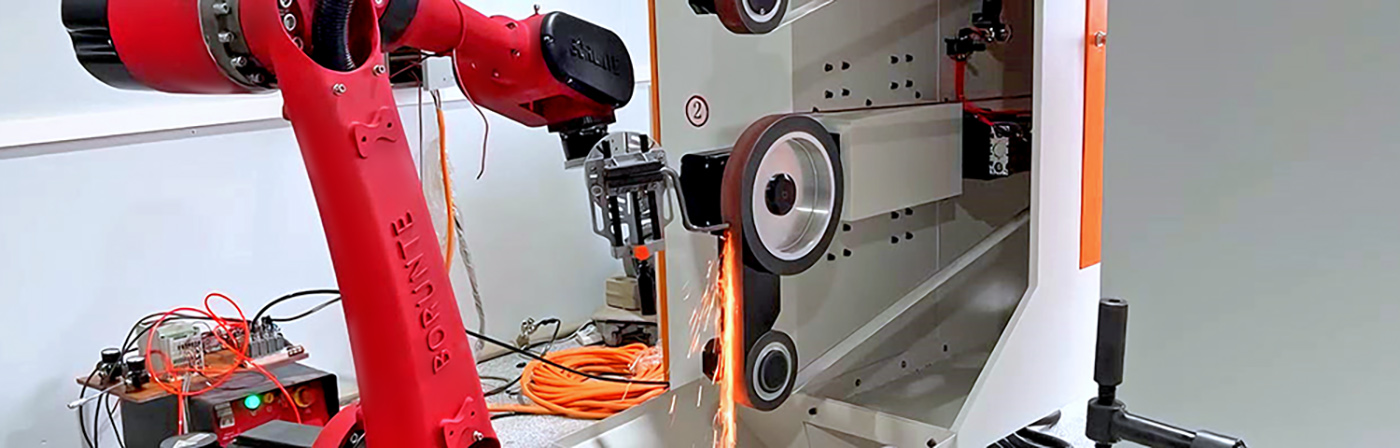  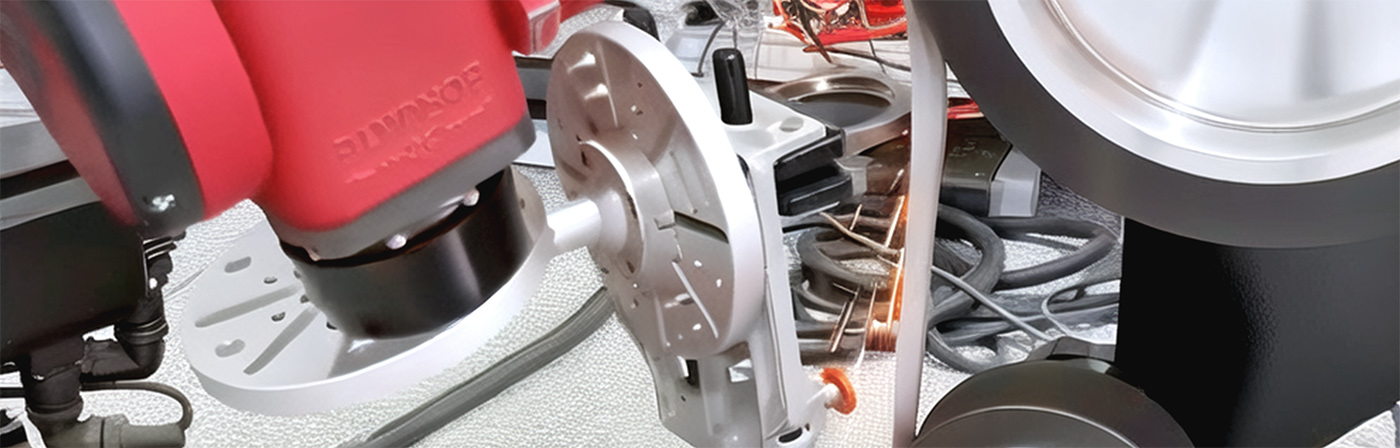 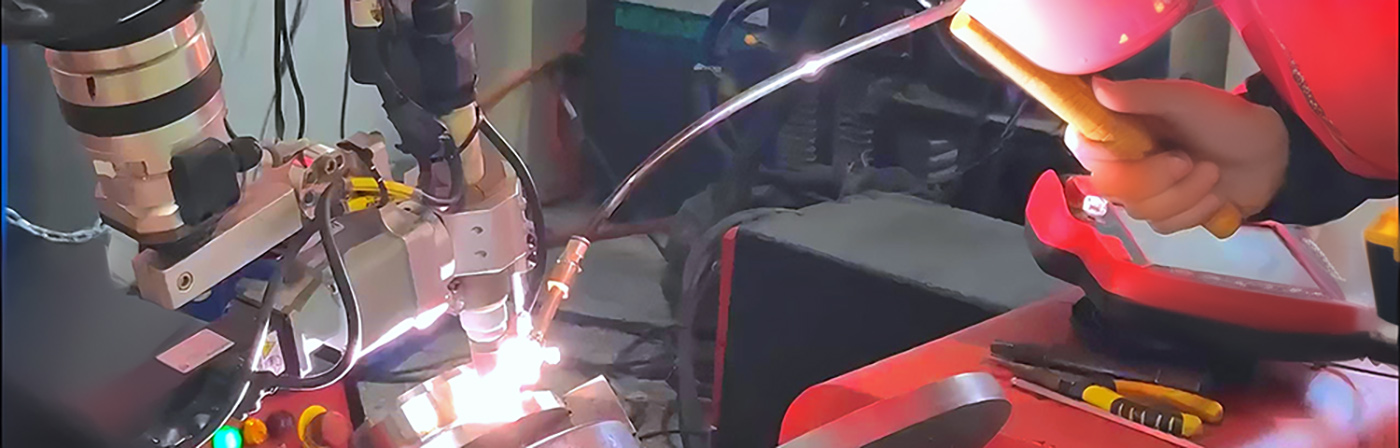
Kategorie produktówIntegratory BORUNTE i BORUNTEW ekosystemie BORUNTE BORUNTE odpowiada za badania i rozwój, produkcję i sprzedaż robotów i manipulatorów. Integratorzy BORUNTE wykorzystują swoją przewagę branżową lub terenową, aby zapewnić projektowanie aplikacji terminalowych, integrację i obsługę posprzedażną dla sprzedawanych przez siebie produktów BORUNTE. Integratorzy BORUNTE i BORUNTE wypełniają swoje obowiązki i są od siebie niezależni, współpracując na rzecz promowania świetlanej przyszłości BORUNTE.
© Copyright - 2010-2024 : Wszelkie prawa zastrzeżone.Mapa witryny - AMP mobilny Pneumatyczne pływające wrzeciono pneumatyczne, Przyssawki gąbkowe, Pneumatyczne pływające wrzeciono elektryczne, Kompensator położenia siły osiowej, Rozgałęźnik niemagnetyczny, System wizualny 2D,
|