



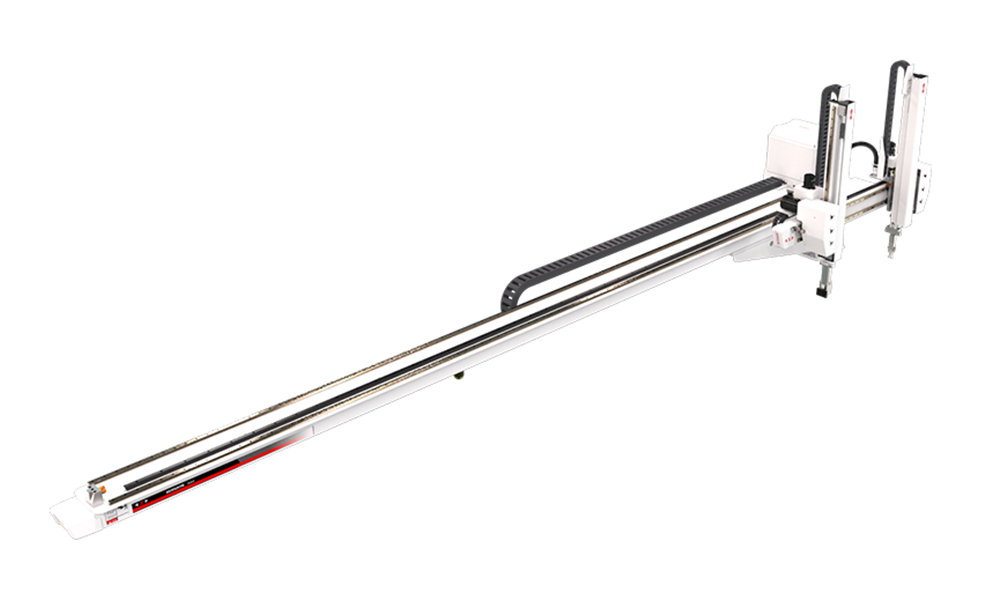
Seria BRTV13WDS5P0/F0 dotyczy wszystkich typów wtryskarek poziomych o zakresie 320T-700T do produktów na wynos i wlewów. Instalacja różni się od tradycyjnych robotów belkowych, produkty umieszczane są na końcu wtryskarek. Posiada podwójne ramię. Ramię pionowe to stolik teleskopowy, a skok pionowy wynosi 1300 mm. Pięcioosiowy serwonapęd AC. Po instalacji przestrzeń montażową wyrzutnika można zaoszczędzić o 30-40%, a zakład można wykorzystać w pełni, co pozwala na lepsze wykorzystanie przestrzeni produkcyjnej, wydajność wzrośnie o 20-30%, zmniejszy się wskaźnik wadliwości, zapewni bezpieczeństwo operatorów, zmniejszyć siłę roboczą i dokładnie kontrolować wydajność, aby zmniejszyć ilość odpadów. Zintegrowany system pięcioosiowego sterownika i kontrolera: mniej linii sygnałowych, komunikacja na duże odległości, dobra wydajność ekspansji, silna zdolność przeciwzakłóceniowa, wysoka dokładność powtarzanego pozycjonowania, możliwość jednoczesnego sterowania wieloma osiami, prosta konserwacja sprzętu i niski wskaźnik awaryjności.

Dokładne pozycjonowanie

Szybko

Długa żywotność

Niski wskaźnik awaryjności

Zmniejsz siłę roboczą

Telekomunikacja
| Źródło zasilania (kVA) | Zalecane IMM (tony) | Napędzany trawersem | Model EOAT |
| 3.40 | 320T-700T | Silnik serwo AC | dwa przyssawki, dwa mocowania |
| Skok poprzeczny (mm) | Skok poprzeczny (mm) | Skok pionowy (mm) | Maksymalne obciążenie (kg) |
| Łuk poziomy o łącznej długości niespełna 6 metrów | aż do | 1300 | 8 |
| Czas wyjmowania na sucho (s) | Czas cyklu suszenia (s) | Zużycie powietrza (NI/cykl) | Waga (kg) |
| 2.3 | aż do | 9 | Niestandardowe |
Reprezentacja modelu: W: typ teleskopowy. D: Ramię produktu + ramię prowadnicy. S5: pięcioosiowy napędzany serwomotorem AC (oś poprzeczna, oś pionowa + oś poprzeczna).
Podane powyżej czasy cykli wynikają z wewnętrznego standardu badawczego naszej firmy. W rzeczywistym procesie aplikacji maszyny będą się one różnić w zależności od rzeczywistej operacji.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6 m | 162 | aż do | aż do | aż do | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | aż do | aż do | 253,5 | 399 | aż do | 549 | aż do |
| Q | |||||||
| 1300 | |||||||
Brak dalszego powiadomienia, jeśli specyfikacja i wygląd ulegną zmianie w wyniku ulepszeń lub z innych powodów. Dziękuję za zrozumienie.

1. Przełącznik stanu
Panel uczący ramienia manipulatora do formowania wtryskowego z tworzywa sztucznego ma trzy stany: Ręczny, Stop i Auto. [Ręczny]: Aby przejść do trybu ręcznego, przesuń przełącznik stanu w lewo. [Stop]: Aby przejść w stan Stop, przesuń przełącznik stanu na środek. Na tym etapie można ustawić parametry. [Auto]: Aby przejść do stanu Auto, przesuń przełącznik stanu na środek. W tym stanie można dokonać ustawień automatycznych i odpowiednich ustawień.
2. Przyciski funkcyjne
Przycisk [Start]:
Funkcja 1: W trybie Auto naciśnij „Start”, aby automatycznie uruchomić manipulator.
Funkcja 2: W stanie Stop naciśnij „Origin”, a następnie „Start”, aby przywrócić manipulator do punktu początkowego.
Funkcja 3: W stanie Stop naciśnij „HP”, a następnie „Start”, aby zresetować początek manipulatora.
Przycisk [Zatrzymaj]:
Funkcja 1: W trybie Auto naciśnij „Stop”, a aplikacja zatrzyma się po zakończeniu modułu. Funkcja 2: Gdy pojawi się alert, dotknij „Stop” w trybie automatycznym, aby usunąć rozwiązany wyświetlacz alarmu.
Przycisk [Pochodzenie]: ma zastosowanie tylko do akcji naprowadzania. Proszę zapoznać się z Sekcją 2.2.4 „Metoda bazowania”.
Przycisk [HP]: Naciśnij „HP”, a następnie „Start, wszystkie osie zostaną zresetowane w kolejności Y1, Y2 Z, X1 i X2, Y1 i Y2 powrócą do 0, a Z, X1 i X2 powrócą do początku stanowisko programu.
Przycisk [Przyspieszanie/Zmniejszanie]: Tych dwóch przycisków można używać do regulacji globalnej prędkości w trybie ręcznym i automatycznym.
Przycisk [Zatrzymanie awaryjne]: W sytuacji awaryjnej naciśnięcie przycisku „Zatrzymanie awaryjne” spowoduje wyłączenie wszystkich osi i włączenie alarmu „Zatrzymanie awaryjne”. Po zdjęciu pokrętła należy nacisnąć klawisz „Stop”, aby wyciszyć alarm.

-

Formowanie wtryskowe
Kategorie produktów
-
Manipulator serwo o wysokiej dokładności pięcioosiowy BRTV0...
-

Liniowy robot przemysłowy do formowania wtryskowego BRTR0...
-

Manipulator dużej prędkości do wtryskiwania form BRTR0...
-

Liniowy manipulator przemysłowy AC serwo BRTR09WD...
-

Manipulator wtrysku serwo AC pięcioosiowy BRTR13...
-

Manipulator robota kartezjańskiego o dużej prędkości BRTR17WD...
Integratory BORUNTE i BORUNTE
W ekosystemie BORUNTE BORUNTE odpowiada za badania i rozwój, produkcję i sprzedaż robotów i manipulatorów. Integratorzy BORUNTE wykorzystują swoją przewagę branżową lub terenową, aby zapewnić projektowanie aplikacji terminalowych, integrację i obsługę posprzedażną dla sprzedawanych przez siebie produktów BORUNTE. Integratorzy BORUNTE i BORUNTE wypełniają swoje obowiązki i są od siebie niezależni, współpracując na rzecz promowania świetlanej przyszłości BORUNTE.
- Tel:+86-400-870-8989
- nr 83, Shafu Road, wioska Shabu, miasto Dalang, miasto Dongguan, prowincja Guangdong, Chiny
- borunterobotcoltd@gmail.com



Przyssawki gąbkowe, System wizualny 2D, Kompensator położenia siły osiowej, Pneumatyczne pływające wrzeciono pneumatyczne, Pneumatyczne pływające wrzeciono elektryczne, Rozgałęźnik niemagnetyczny,
-

wr
-

e-mail
-

Telefon
-

Whatsapp
-

Szczyt