




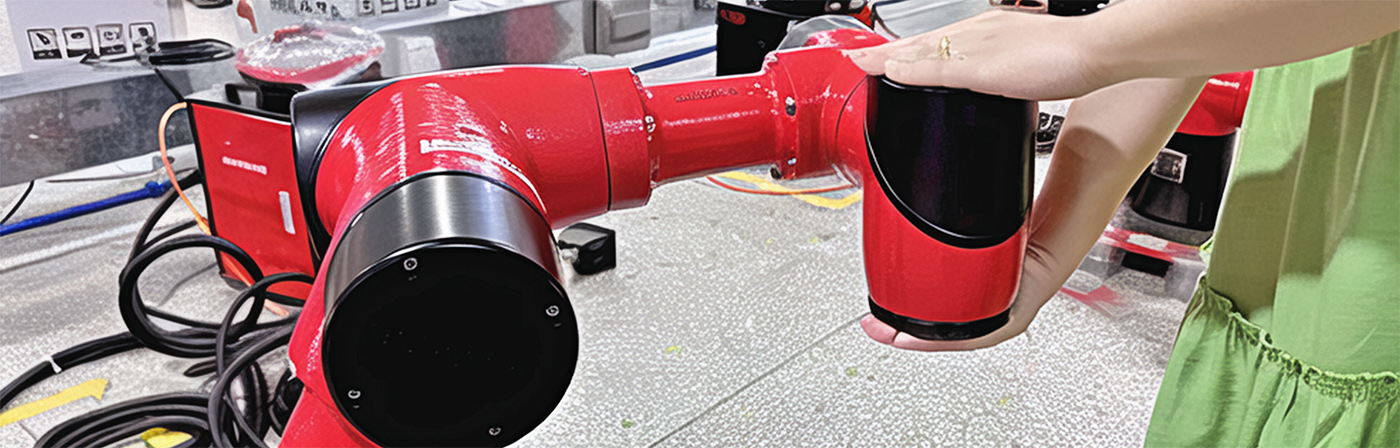
BRTIRXZ0805A to sześcioosiowy robot współpracujący z funkcją uczenia poprzez przeciąganie, opracowany niezależnie przez firmę BORUNTE. o maksymalnym obciążeniu 5 kg i maksymalnej długości ramienia 930 mm. Posiada funkcje wykrywania kolizji i odtwarzania toru. Jest bezpieczny i wydajny, inteligentny i łatwy w użyciu, elastyczny i lekki, ekonomiczny i niezawodny, ma niskie zużycie energii i inne cechy, które w znacznym stopniu spełniają potrzeby współpracy człowiek-maszyna. Jego wysoką czułość i szybką reakcję można zastosować na elastycznej linii produkcyjnej o dużej gęstości, aby zaspokoić potrzeby pakowania produktów, formowania wtryskowego, załadunku i rozładunku, montażu i innych operacji, szczególnie w przypadku wymagań związanych z pracą zespołową człowiek-maszyna. Stopień ochrony osiąga IP50. Odporny na kurz i wodę. Dokładność powtarzania pozycjonowania wynosi ±0,1 mm.

Dokładne pozycjonowanie

Szybko

Długa żywotność

Niski wskaźnik awaryjności

Zmniejsz siłę roboczą

Telekomunikacja
| Przedmiot | Zakres | Maksymalna prędkość | ||
| Ramię | J1 | ±180° | 180°/s | |
| J2 | ±90° | 180°/s | ||
| J3 | -70°~+240° | 180°/s | ||
| Nadgarstek | J4 | ±180° | 180°/s | |
| J5 | ±180° | 180°/s | ||
| J6 | ±360° | 180°/s | ||
|
| ||||
| Długość ramienia (mm) | Możliwość ładowania (kg) | Powtarzalna dokładność pozycjonowania (mm) | Źródło zasilania (kVA) | Waga (kg) |
| 930 | 5 | ±0,05 | 0,76 | 28 |

Cechy BRTIRXZ0805A
1. Współpraca człowiek-maszyna bezpieczniejsza: wbudowany czujnik momentu obrotowego o wysokiej niezawodności z funkcją wykrywania kolizji może skutecznie zapewnić bezpieczeństwo współpracy człowiek-maszyna, bez konieczności izolowania ogrodzenia, co znacznie oszczędza miejsce.
2. Łatwe sterowanie i uczenie metodą przeciągania: programowanie można osiągnąć poprzez przeciąganie trajektorii lub wykorzystanie wizualnego zapisu 3D trajektorii celu, co jest proste i łatwe w użyciu;
3.Lekka, przenośna i prosta konstrukcja: Zaprojektowany z lekką konstrukcją, cały robot waży niecałe 35KG i jest wyposażony w wysoce zintegrowany moduł, co znacznie upraszcza wewnętrzną konstrukcję korpusu oraz ułatwia demontaż i montaż.
4. Ekonomicznie i wydajnie: piękna konstrukcja robota i niski koszt. Charakteryzuje się niską inwestycją początkową, wysoką opłacalnością, elastycznymi i płynnymi ruchami oraz maksymalną prędkością 2,0 m/s.
5. Funkcje bezpieczeństwa: Zaawansowane funkcje bezpieczeństwa, takie jak wykrywanie kolizji i monitorowanie siły, są często zintegrowane z tymi robotami, zapewniając bezpieczną pracę w pobliżu ludzi. Dzięki temu nadają się do zastosowań w robotach współpracujących (cobotach), w których ludzie i roboty współpracują.
Warunki pracy BRTIRXZ0805A
1, zasilacz: szafa sterownicza AC: 220 V ± 10% 50 HZ/60 HZ, korpus DC: 48 V ± 10%
2, temperatura pracy: 0 ℃-45 ℃; temperatura uderzenia: 15 ℃-25 ℃
3, Wilgotność względna: 20-80% RH (bez kondensacji)
4, hałas: ≤75dB(A)



-
Współpraca człowieka i maszyny
-

Formowanie wtryskowe
-

transport
-
złożenie
Kategorie produktów





Integratory BORUNTE i BORUNTE
W ekosystemie BORUNTE BORUNTE odpowiada za badania i rozwój, produkcję i sprzedaż robotów i manipulatorów. Integratorzy BORUNTE wykorzystują swoją przewagę branżową lub terenową, aby zapewnić projektowanie aplikacji terminalowych, integrację i obsługę posprzedażną dla sprzedawanych przez siebie produktów BORUNTE. Integratorzy BORUNTE i BORUNTE wypełniają swoje obowiązki i są od siebie niezależni, współpracując na rzecz promowania świetlanej przyszłości BORUNTE.
- Tel:+86-400-870-8989
- nr 83, Shafu Road, wioska Shabu, miasto Dalang, miasto Dongguan, prowincja Guangdong, Chiny
- borunterobotcoltd@gmail.com



Pneumatyczne pływające wrzeciono pneumatyczne, System wizualny 2D, Rozgałęźnik niemagnetyczny, Przyssawki gąbkowe, Kompensator położenia siły osiowej, Pneumatyczne pływające wrzeciono elektryczne,
-

wr
-

e-mail
-

Telefon
-

Whatsapp
-

Szczyt