BRTIRPH1210A er en seksakset robot utviklet av BORUNTE for sveise-, avgradings- og slipeapplikasjonsindustrien. Den er kompakt i formen, liten i størrelse, lett i vekt, med en maksimal belastning på 10 kg og et armspenn på 1225 mm. Håndleddet har en hul struktur, noe som gjør ledningen mer praktisk og bevegelsen mer fleksibel. De første, andre og tredje leddene er alle utstyrt med høypresisjonsreduksjoner, og de fjerde, femte og sjette leddene er alle utstyrt med høypresisjonsgirstrukturer. Den høyhastighets skjøtehastigheten muliggjør fleksibel drift. Beskyttelsesgraden når IP54. Støvtett og vanntett. Den gjentatte posisjoneringsnøyaktigheten er ±0,07 mm.

Nøyaktig posisjonering

Rask

Lang levetid

Lav feilfrekvens

Reduser arbeidskraft

Telekommunikasjon
| Punkt | Spekter | Maks hastighet | ||
| Væpne | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Håndledd | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Armlengde (mm) | Lasteevne (kg) | Gjentatt posisjoneringsnøyaktighet (mm) | Strømkilde (kVA) | Vekt (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Hva er fordelene med å kjøpe profesjonell poleringsrobotarm? BORUNTE polerende industriroboter kan forbedre produksjonseffektiviteten, forbedre produktkvaliteten, redusere arbeidskostnader og risiko for menneskelige feil, den kan jobbe i høye temperaturer, skadelig gass og andre miljøer for å gi et tryggere arbeidsmiljø. 2. Hvordan velge en polerende industrirobot som passer dine behov? Når du velger en robot, bør følgende faktorer tas i betraktning: arbeidsbelastning, arbeidsområde, krav til nøyaktighet, arbeidshastighet, sikkerhetskrav, programmering og enkelhet i drift, vedlikeholdskrav og budsjettbegrensninger. Samtidig bør det også gjennomføres konsultasjoner med leverandører og fagfolk for å få mer detaljerte forslag. Viktige funksjoner ved profesjonell poleringsrobotarm: 1. Presisjon og repeterbarhet: Poleringsarbeid krever vanligvis svært presise bevegelser og konsekvent drift. Industriroboter kan posisjonere og kontrollere med millimeternivånøyaktighet, og sikrer konsistente resultater i hver operasjon. 2. Automatisering og effektivitet: Et av hovedformålene til industriroboter er å forbedre produksjonseffektiviteten. Poleringsprosessen er vanligvis tungvint og tidkrevende, men roboter kan utføre oppgaver på en rask og konsistent måte, og dermed forbedre den totale effektiviteten til produksjonslinjen. 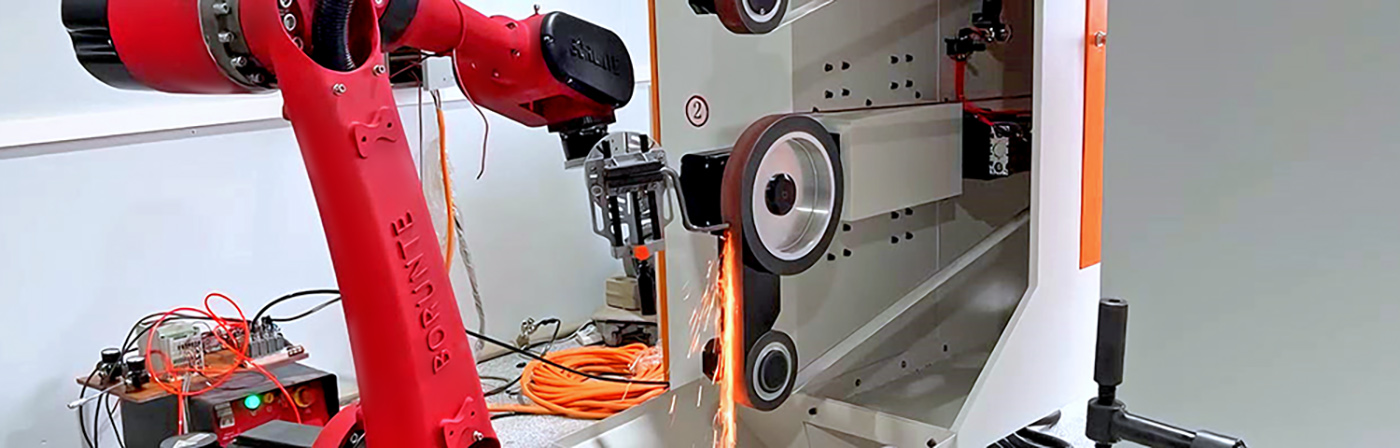  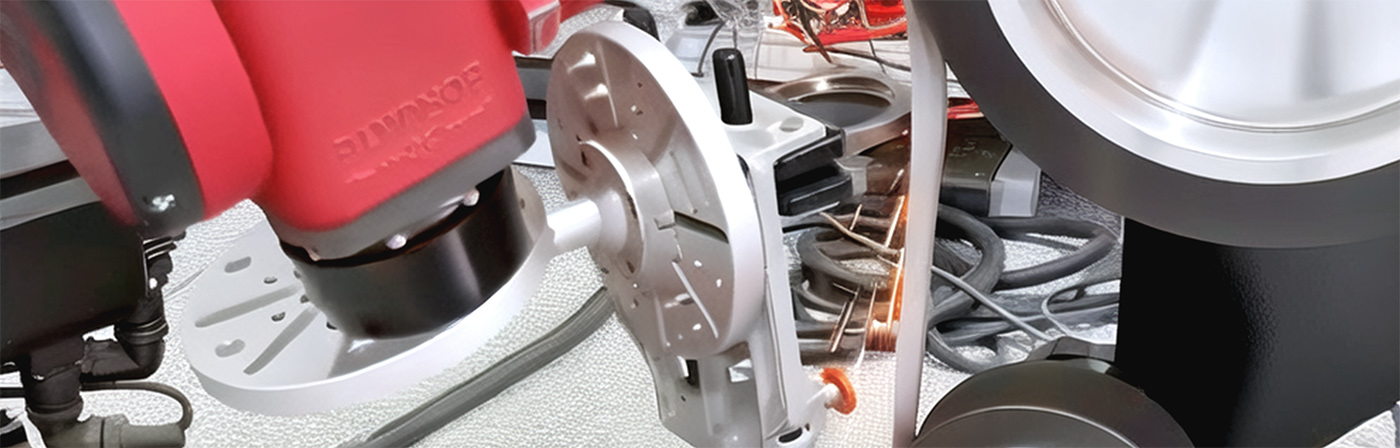 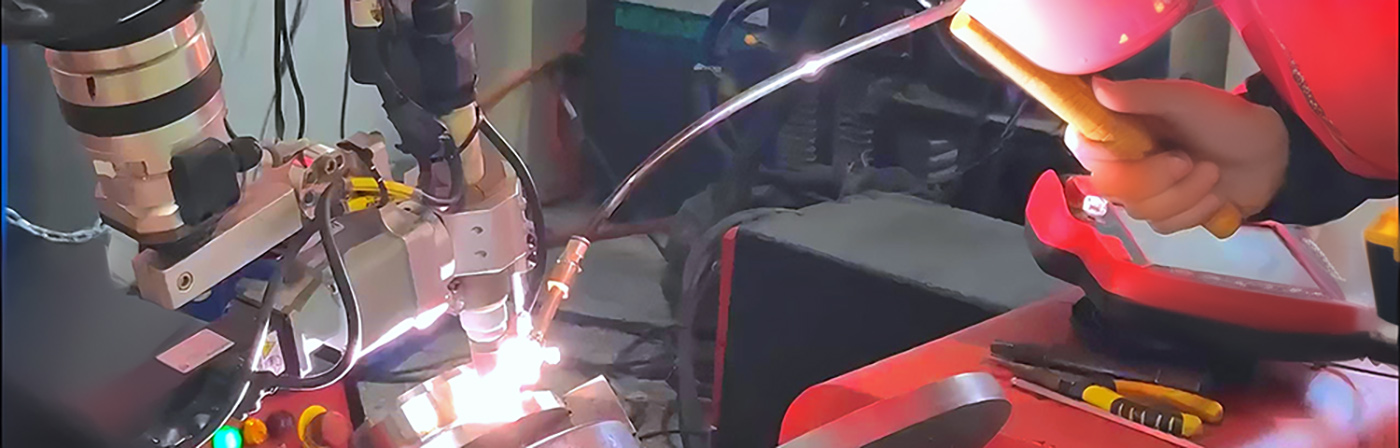
ProduktkategorierBORUNTE og BORUNTE integratorerI BORUNTE-økosystemet er BORUNTE ansvarlig for FoU, produksjon og salg av roboter og manipulatorer. BORUNTE-integratorer utnytter sine industri- eller feltfordeler til å tilby terminalapplikasjonsdesign, integrasjon og ettersalgsservice for BORUNTE-produktene de selger. BORUNTE- og BORUNTE-integratorer oppfyller sitt respektive ansvar og er uavhengige av hverandre, og jobber sammen for å fremme BORUNTEs lyse fremtid.
© Copyright - 2010-2024 : Med enerett.Sitemap - AMP mobil Pneumatisk flytende pneumatisk spindel, Svamp sugekopper, Pneumatisk flytende elektrisk spindel, Aksialkraftposisjonskompensator, Ikke magnetisk splitter, 2D visuelt system,
|