



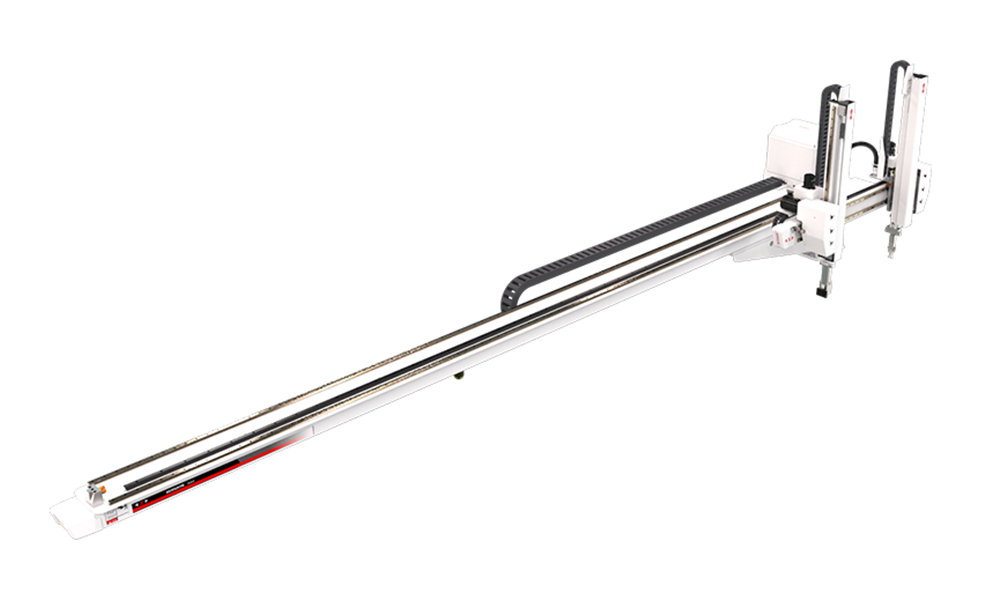
De BRTV13WDS5P0/F0-serie is van toepassing op alle typen horizontale injectiemachines van 320T-700T voor afhaalproducten en aanspuiting. De installatie is anders dan traditionele balkenrobots, producten worden aan het uiteinde van spuitgietmachines geplaatst. Het heeft een dubbele arm. De verticale arm is een telescopisch podium en de verticale slag bedraagt 1300 mm. Vijfassige AC-servoaandrijving. Na installatie kan de installatieruimte van de ejector met 30-40% worden bespaard en kan de fabriek vollediger worden gebruikt, waardoor de productieruimte beter kan worden benut. De productiviteit wordt met 20-30% verhoogd, het defectpercentage wordt verlaagd, de veiligheid van operators, vermindering van mankracht en nauwkeurige controle van de output om verspilling te verminderen. Geïntegreerd systeem met driver en controller met vijf assen: minder signaallijnen, langeafstandscommunicatie, goede uitbreidingsprestaties, sterk anti-interferentievermogen, hoge nauwkeurigheid bij herhaalde positionering, kan gelijktijdig meerdere assen besturen, eenvoudig onderhoud van de apparatuur en een laag uitvalpercentage.

Nauwkeurige positionering

Snel

Lange levensduur

Laag uitvalpercentage

Verminder arbeid

Telecommunicatie
| Stroombron (kVA) | Aanbevolen IMM (ton) | Traverse gedreven | Model van EOAT |
| 3.40 | 320T-700T | AC-servomotor | twee zuigingen, twee armaturen |
| Dwarsslag (mm) | Dwarsslag (mm) | Verticale slag (mm) | Max. belasting (kg) |
| Horizontale boog met een totale lengte van minder dan 6 meter | in behandeling | 1300 | 8 |
| Droge afhaaltijd (sec) | Droogcyclustijd (sec) | Luchtverbruik (NI/cyclus) | Gewicht (kg) |
| 2.3 | in behandeling | 9 | Niet-standaard |
Modelweergave: W: telescopisch type. D: Productarm + looparm. S5: Vijfassig aangedreven door AC-servomotor (dwarsas, verticale as + dwarsas).
De bovengenoemde cyclustijden zijn de resultaten van de interne testnorm van ons bedrijf. Tijdens het daadwerkelijke toepassingsproces van de machine zullen ze variëren afhankelijk van de daadwerkelijke werking.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | in behandeling | in behandeling | in behandeling | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | in behandeling | in behandeling | 253,5 | 399 | in behandeling | 549 | in behandeling |
| Q | |||||||
| 1300 | |||||||
Geen verdere kennisgeving als de specificatie en het uiterlijk worden gewijzigd vanwege verbeteringen en andere redenen. Bedankt voor uw begrip.

1. Statusschakelaar
De onderwijshanger van de kunststof spuitgietmanipulatorarm heeft drie statussen: Handmatig, Stop en Auto. [Handmatig]: Om naar de handmatige modus te gaan, verplaatst u de statusschakelaar naar links. [Stop]: Om naar de Stop-status te gaan, verplaatst u de statusschakelaar naar het midden. In deze fase kunnen parameters worden ingesteld. [Auto]: Om naar de Auto-status te gaan, verplaatst u de statusschakelaar naar het midden. In deze toestand kunnen automatische en overeenkomstige instellingen worden uitgevoerd.
2. Functieknoppen
[Start]-knop:
Functie 1: Druk in de Auto-modus op "Start" om de manipulator automatisch te starten.
Functie 2: Druk in de stopstatus op "Origin" en vervolgens op "Start" om de manipulator naar de oorsprong te herstellen.
Functie 3: Druk in de stopstatus op "HP" en vervolgens op "Start" om de oorsprong van de manipulator te resetten.
[Stop]-knop:
Functie 1: Druk in de Auto-modus op "Stop" en de applicatie stopt wanneer de module klaar is. Functie 2: Wanneer er een waarschuwing optreedt, tikt u op "Stop" in de automatische modus om de opgeloste alarmweergave te wissen.
[Origin]-knop: Deze is alleen van toepassing op homing-acties. Raadpleeg paragraaf 2.2.4 "Homing-methode".
[HP]-knop: Druk op "HP" en vervolgens op "Start, alle assen worden gereset in de volgorde Y1, Y2 Z, X1 en X2, Y1 en Y2 keren terug naar 0, en Z, X1 en X2 keren terug naar het begin positie van het programma.
[Speed Up/Down]-knop: Deze twee knoppen kunnen worden gebruikt om de globale snelheid in de handmatige en automatische status aan te passen.
[Noodstop]-knop: Als u in een noodgeval op de knop "Noodstop" drukt, worden alle assen uitgeschakeld en klinkt het alarm "Noodstop". Nadat u de knop hebt verwijderd, drukt u op de "Stop"-toets om het alarm uit te zetten.

-

Spuitgieten
Producten categorieën
-
Vijfassige servomanipulator met hoge nauwkeurigheid BRTV0 ...
-

Lineaire industriële spuitgietrobot BRTR0...
-

Hogesnelheidsmanipulator voor matrijsinjectie BRTR0...
-

AC servo lineaire industriële manipulator BRTR09WD...
-

Vijfassige AC-servo-injectiemanipulator BRTR13...
-

Snelle snelheid Cartesiaanse robotmanipulator BRTR17WD...
BORUNTE- en BORUNTE-integratoren
In het BORUNTE-ecosysteem is BORUNTE verantwoordelijk voor de R&D, productie en verkoop van robots en manipulatoren. BORUNTE-integratoren maken gebruik van hun industriële of veldvoordelen om het ontwerp, de integratie en de after-sales service van terminalapplicaties te leveren voor de BORUNTE-producten die zij verkopen. BORUNTE en BORUNTE-integratoren vervullen hun respectieve verantwoordelijkheden en zijn onafhankelijk van elkaar en werken samen om de mooie toekomst van BORUNTE te bevorderen.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, provincie Guangdong, China
- borunterobotcoltd@gmail.com



Spons zuignappen, 2D visueel systeem, Axiale krachtpositiecompensator, Pneumatische zwevende pneumatische spindel, Pneumatische zwevende elektrische spindel, Niet-magnetische splitter,
-

vr
-

e-mail
-

Telefoon
-

WhatsApp
-

Bovenkant