




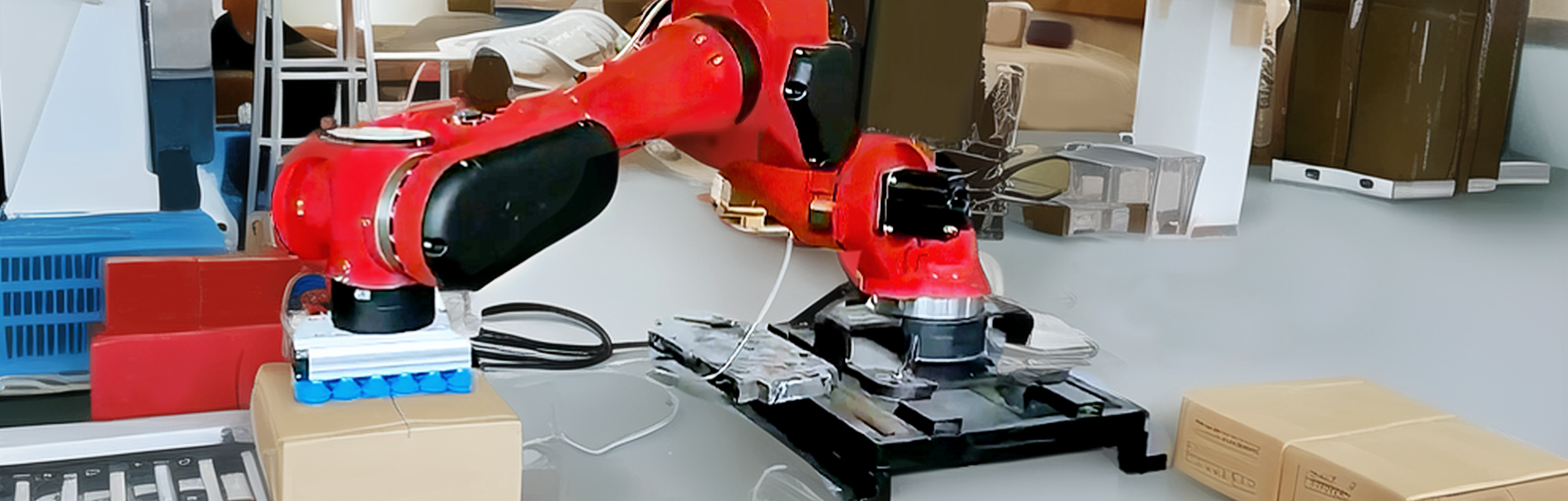
BRTIRPL1608A အမျိုးအစား စက်ရုပ်သည် BORUNTE မှ တပ်ဆင်ခြင်း၊ အမျိုးအစားခွဲခြင်းနှင့် အလင်း၊ သေးငယ်ပြီး ပြန့်ကျဲနေသော ပစ္စည်းများ၏ အခြားအပလီကေးရှင်းအခြေအနေများအတွက် BORUNTE မှ ဖန်တီးထားသည့် လေးဝင်ရိုးစက်ရုပ်ဖြစ်သည်။ အမြင့်ဆုံးလက်တံအရှည်မှာ 1600mm ဖြစ်ပြီး အမြင့်ဆုံးဝန်မှာ 8KG ဖြစ်သည်။ ကာကွယ်မှုအဆင့်သည် IP40 သို့ရောက်ရှိသည်။ ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှုသည် ±0.1mm ဖြစ်သည်။

တိကျသောနေရာချထားခြင်း။

မြန်သည်။

ရှည်လျားသောဝန်ဆောင်မှုဘဝ

နိမ့်ကျမှုနှုန်း

အလုပ်သမားလျှော့ချပါ။

ဆက်သွယ်ရေး
| ကုသိုလ်ကံ | အပိုင်းအခြား | အပိုင်းအခြား | အမြင့်ဆုံးမြန်နှုန်း | ||
| ဆရာကြီးလက်မောင်း | အထက်ပိုင်း | မျက်နှာပြင်မှ လေဖြတ်ခြင်းအကွာအဝေး 1146mm တွင် တပ်ဆင်ခြင်း။ | ၃၈° | လေဖြတ်ခြင်း : 25/305/25 (mm) | |
| ချောင်းဟန့်သည်။ | 98° | ||||
| အဆုံး | J4 | ±360° | (စက်ဘီးစီးခြင်း/စည်းချက်) 0kg/150time/min,3kg/150time/min,5kg/130time/min,8kg/115time/min | ||
| လက်တံအရှည် (မီလီမီတာ) | တင်နိုင်မှု (ကီလိုဂရမ်) | ထပ်ခါတလဲလဲ နေရာချထားခြင်း တိကျမှု (မီလီမီတာ) | ပါဝါရင်းမြစ် (kVA) | အလေးချိန် (ကီလိုဂရမ်) | |
| ၁၆၀၀ | 8 | ±0.1 | ၆.၃၆ | ၂၅၆ | |

BRTIRPL1608A သည် BORUNTE ၏ အတွေ့အကြုံရှိသော အင်ဂျင်နီယာအဖွဲ့မှ နှစ်ပေါင်းများစွာ ကျယ်ပြန့်သော သုတေသနနှင့် ဖွံ့ဖြိုးတိုးတက်မှု၏ ရလဒ်ဖြစ်သည်။ စက်ရုပ်များနှင့် အလိုအလျောက်စနစ်ဆိုင်ရာ ကျွမ်းကျင်မှုများကို အသုံးချကာ ခေတ်မီစက်မှုလုပ်ငန်းများ၏ လိုအပ်ချက်များနှင့် ကိုက်ညီသည့် စက်ရုပ်တစ်ရုပ်ကို ဖန်တီးရန် နည်းပညာဆိုင်ရာ စိန်ခေါ်မှုအမျိုးမျိုးကို ကျော်ဖြတ်ခဲ့ကြသည်။ ဖွံ့ဖြိုးတိုးတက်မှုလုပ်ငန်းစဉ်တွင် စွမ်းဆောင်ရည်အမြင့်ဆုံးစံချိန်စံညွှန်းများ၊ ယုံကြည်စိတ်ချရမှုနှင့် ဘေးကင်းမှုတို့ကို သေချာစေရန် ပြင်းထန်သောစမ်းသပ်ခြင်း၊ ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ခြင်းနှင့် ကောင်းစွာချိန်ညှိခြင်းတို့ ပါဝင်ပါသည်။
1. ရွေးချယ်ပြီး နေရာ-ဝင်ရိုးတန်းလေးခု မျဉ်းပြိုင်စက်ရုပ်သည် အရွယ်အစားအမျိုးမျိုးနှင့် ပုံသဏ္ဍာန်အမျိုးမျိုးရှိသည့် အရာဝတ္ထုများကို ထိထိရောက်ရောက် ကိုင်တွယ်ကိုင်တွယ်ရာတွင် ထူးချွန်သည်။ ၎င်း၏တိကျသောရွေ့လျားမှုများနှင့် လျင်မြန်သောအမြန်နှုန်းသည် လျင်မြန်သောအမျိုးအစားခွဲခြင်း၊ အစုလိုက်အပုံလိုက်နှင့် ပစ္စည်းများလွှဲပြောင်းပေးခြင်းတို့ကို လုပ်ဆောင်နိုင်ပြီး လူကိုယ်တိုင်လုပ်အားကို လျှော့ချပေးပြီး ကုန်ထုတ်စွမ်းအားကို မြှင့်တင်ပေးသည်။
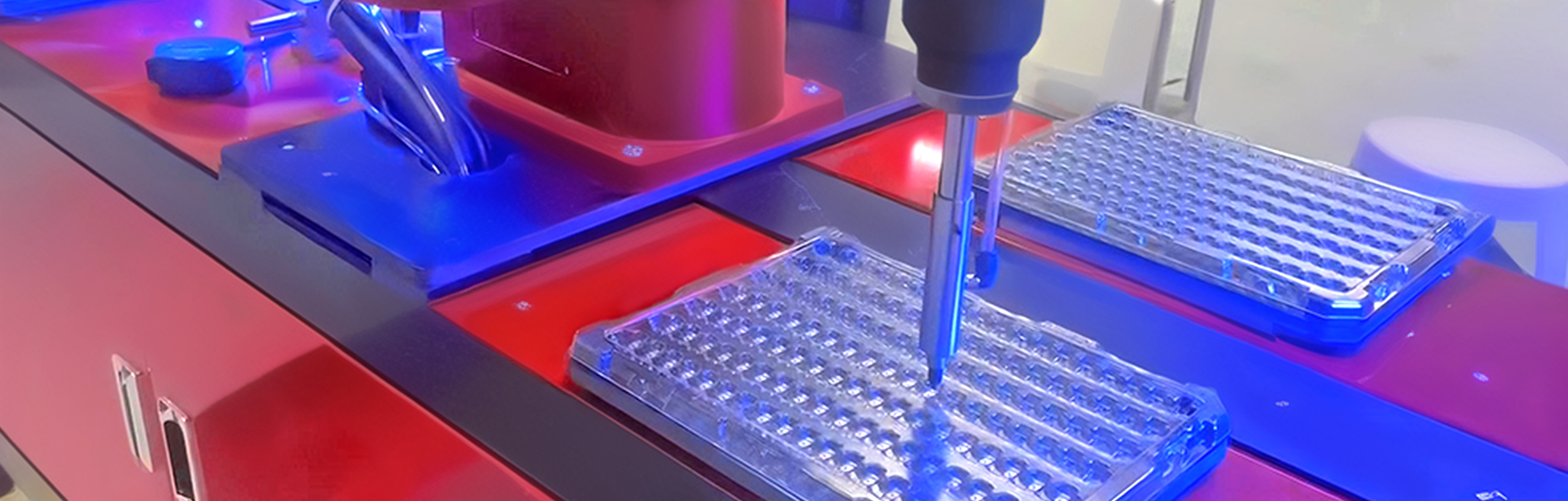
2. စည်းဝေးပွဲ- ၎င်း၏ မြင့်မားသော တိကျမှုနှင့် ဘက်စုံသုံးနိုင်မှုနှင့်အတူ၊ ဤစက်ရုပ်သည် တပ်ဆင်ခြင်းလုပ်ငန်းအတွက် အကောင်းဆုံးရွေးချယ်မှုတစ်ခုဖြစ်သည်။ ၎င်းသည် တိကျသော ချိန်ညှိမှုနှင့် လုံခြုံသောချိတ်ဆက်မှုများကို သေချာစေရန် ရှုပ်ထွေးရှုပ်ထွေးသော အစိတ်အပိုင်းများကို အပြစ်ကင်းစင်စွာကိုင်တွယ်နိုင်သည်။ Four-Axis Parallel Robot သည် တပ်ဆင်ခြင်းလုပ်ငန်းစဉ်များကို ချောမွေ့စေပြီး အရည်အသွေးကောင်းမွန်သော ထိန်းချုပ်မှုနှင့် တပ်ဆင်ချိန်ကို လျှော့ချပေးသည်။
3. ထုပ်ပိုးမှု- စက်ရုပ်၏ လျင်မြန်သော အမြန်နှုန်းနှင့် တိကျသော လှုပ်ရှားမှုများက ၎င်းကို ထုပ်ပိုးမှုဆိုင်ရာ အသုံးချမှုများအတွက် စံပြဖြစ်စေသည်။ ၎င်းသည် ထုတ်ကုန်များကို သေတ္တာများ၊ သေတ္တာများ သို့မဟုတ် ကွန်တိန်နာများအတွင်းသို့ လျင်မြန်စွာ ထုပ်ပိုးနိုင်ပြီး တသမတ်တည်းနေရာချထားမှုနှင့် ထုပ်ပိုးမှုအမှားအယွင်းများကို လျှော့ချနိုင်စေပါသည်။ Four-Axis Parallel Robot သည် ထုပ်ပိုးမှု စွမ်းဆောင်ရည်ကို ကောင်းမွန်စေပြီး ပမာဏမြင့်မားသော ထုတ်လုပ်မှုကို ပံ့ပိုးပေးသည်။
1. ဝင်ရိုးတန်း မျဉ်းပြိုင် စက်ရုပ်ကို ကျွန်ုပ်၏ လက်ရှိ ထုတ်လုပ်ရေးလိုင်းတွင် မည်သို့ ပေါင်းစပ်နိုင်မည်နည်း။
BORUNTE သည် ပြီးပြည့်စုံသော ပေါင်းစည်းမှုကို ပံ့ပိုးပေးပါသည်။ ကျွန်ုပ်တို့၏ ကျွမ်းကျင်ပညာရှင်များအဖွဲ့သည် သင့်လိုအပ်ချက်များကို နားလည်သဘောပေါက်ရန်နှင့် သင့်ထုတ်လုပ်မှုလိုင်းတွင် ချောမွေ့စွာ လိုက်လျောညီထွေဖြစ်စေရန်အတွက် စက်ရုပ်၏ပေါင်းစပ်မှုကို စိတ်ကြိုက်ပြင်ဆင်ပေးပါမည်။ နောက်ထပ်အကူအညီအတွက် ကျွန်ုပ်တို့၏အရောင်းအဖွဲ့ကို ဆက်သွယ်ပါ။
2. စက်ရုပ်၏ အမြင့်ဆုံးပေးဆောင်နိုင်မှုပမာဏမှာ အဘယ်နည်း။
Four-Axis Parallel Robot တွင် အမြင့်ဆုံး 8 ကီလိုဂရမ်အထိ ခံနိုင်ရည်ရှိပြီး ကျယ်ပြန့်သော အရာဝတ္ထုများနှင့် ပစ္စည်းများကို ထိရောက်စွာ ကိုင်တွယ်နိုင်ကြောင်း အာမခံပါသည်။
3. စက်ရုပ်သည် ရှုပ်ထွေးသော အလုပ်များကို လုပ်ဆောင်ရန် အစီအစဉ်ဆွဲနိုင်ပါသလား။
လုံးဝ! အလိုအလျောက်အပြိုင်စီခြင်းစက်ရုပ်သည် အဆင့်မြင့်ပရိုဂရမ်းမင်းစွမ်းရည်များပါရှိသည်။ ၎င်းသည် အမျိုးမျိုးသော ပရိုဂရမ်းမင်းဘာသာစကားများကို ပံ့ပိုးပေးပြီး ရှုပ်ထွေးသောလုပ်ဆောင်စရာများကို လွယ်ကူစွာ ပရိုဂရမ်ပြုလုပ်ရန်အတွက် အသုံးပြုရလွယ်ကူသော အင်တာဖေ့စ်ကို ပေးဆောင်သည်။ ကျွန်ုပ်တို့၏ နည်းပညာပံ့ပိုးကူညီမှုအဖွဲ့သည် သင်၏ သီးခြားအက်ပ်လီကေးရှင်းအတွက် စက်ရုပ်ကို ပရိုဂရမ်ရေးဆွဲရာတွင် ကူညီပေးနိုင်ပါသည်။
Heavy Loading Stacking Robots အတွက် လျှောက်လွှာများ
Palletizing၊ depalletizing၊ order picking နှင့် အခြားသော လုပ်ငန်းများကို လေးလံသော loading stacking စက်ရုပ်များဖြင့် လုပ်ဆောင်နိုင်ပါသည်။ ၎င်းတို့သည် ကြီးမားသောဝန်ထုပ်ဝန်ပိုးကို စီမံခန့်ခွဲရန်အတွက် လက်တွေ့ကျသောနည်းလမ်းကို ပေးဆောင်ပြီး မြောက်မြားစွာသော လက်စွဲလုပ်ငန်းစဉ်များကို အလိုအလျောက်လုပ်ဆောင်ရန်၊ လူသားလုပ်သားလိုအပ်ချက်ကို လျှော့ချရန်နှင့် ကုန်ထုတ်စွမ်းအားမြှင့်တင်ရန်အတွက် ၎င်းတို့ကို အသုံးပြုနိုင်သည်။ လေးလံသော loading stacking စက်ရုပ်များကို မော်တော်ကားများ ထုတ်လုပ်ခြင်း၊ အစားအသောက်နှင့် အဖျော်ယမကာများ စီမံဆောင်ရွက်ခြင်း၊ ထောက်ပံ့ပို့ဆောင်ရေးနှင့် ဖြန့်ဖြူးရေးတို့တွင်လည်း မကြာခဏ အသုံးပြုပါသည်။


-
သယ်ယူပို့ဆောင်ရေး
-
စီခြင်း။
-

ထောက်လှမ်းခြင်း။
-
အမြင်





BORUNTE နှင့် BORUNTE ပေါင်းစည်းသူများ
BORUNTE ဂေဟစနစ်တွင်၊ BORUNTE သည် R&D၊ ထုတ်လုပ်မှုနှင့် စက်ရုပ်များနှင့် ခြယ်လှယ်သူများ၏ ရောင်းချမှုအတွက် တာဝန်ရှိပါသည်။ BORUNTE ပေါင်းစည်းသူများသည် ၎င်းတို့ရောင်းချသည့် BORUNTE ထုတ်ကုန်များအတွက် terminal လျှောက်လွှာဒီဇိုင်း၊ ပေါင်းစည်းမှုနှင့် အရောင်းအပြီးဝန်ဆောင်မှုများကို ပေးဆောင်ရန် ၎င်းတို့၏စက်မှုလုပ်ငန်း သို့မဟုတ် နယ်ပယ်အားသာချက်များကို အသုံးချသည်။ BORUNTE နှင့် BORUNTE ပေါင်းစည်းသူများသည် ၎င်းတို့၏ သက်ဆိုင်ရာ တာဝန်များကို ကျေပွန်ပြီး BORUNTE ၏ တောက်ပသော အနာဂတ်ကို မြှင့်တင်ရန်အတွက် အချင်းချင်း လက်တွဲလုပ်ဆောင်ကာ အချင်းချင်း အမှီအခိုကင်းကြသည်။
- ဖုန်း-+86-400-870-8989
- နံပါတ် ၈၃၊ Shafu လမ်း၊ Shabu ရွာ၊ Dalang မြို့၊ Dongguan မြို့၊ Guangdong ပြည်နယ်၊ China
- borunterobotcoltd@gmail.com



Axial force position compensator, Pneumatic ရေပေါ် pneumatic ဗိုင်းလိပ်တံ, သံလိုက်မဟုတ်သောခွဲခြမ်း, 2D ရုပ်ထွက်စနစ်, ရေမြှုပ်စုပ်ခွက်များ, Pneumatic ရေပေါ်လျှပ်စစ်ဗိုင်းလိပ်တံ,
-

vr
-

အီးမေးလ်
-

ဖုန်း
-

Whatsapp
-

ထိပ်တန်း