




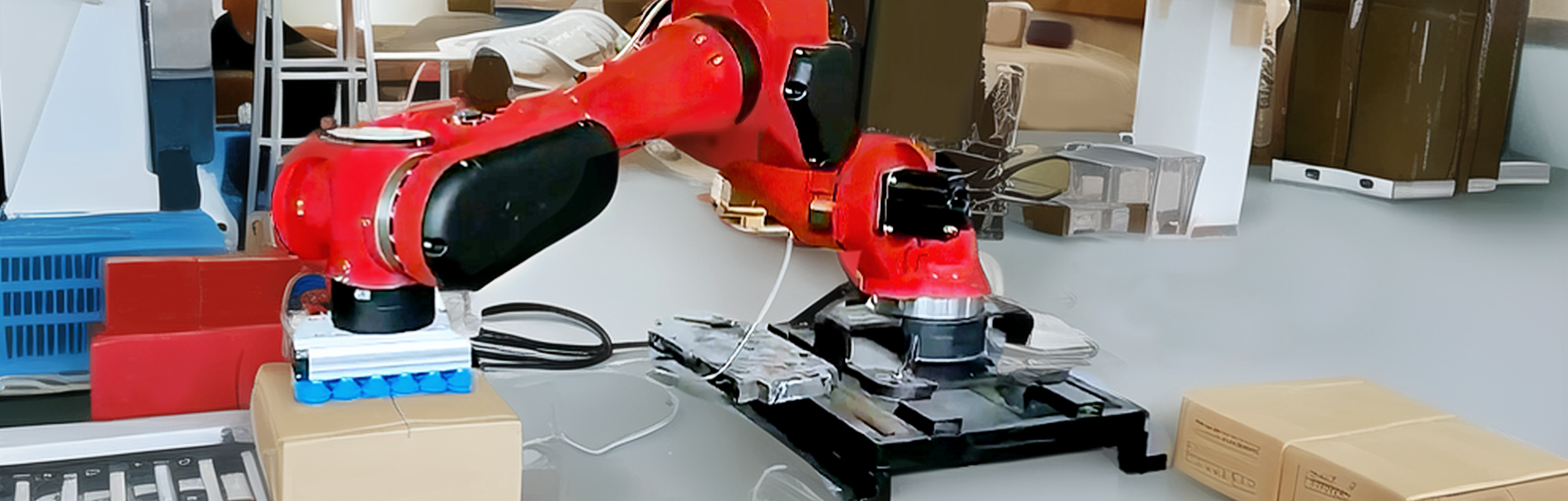
Robot tat-tip BRTIRPL1608A huwa robot ta 'erba' assi li żviluppa minn BORUNTE għall-assemblaġġ, l-għażla u xenarji oħra ta 'applikazzjoni ta' materjali ħfief, żgħar u mxerrda. It-tul massimu tad-driegħ huwa 1600mm u t-tagħbija massima hija 8KG. Il-grad ta 'protezzjoni jilħaq IP40. L-eżattezza tal-pożizzjonament ripetuta hija ± 0.1mm.

Pożizzjonament preċiż

Fast

Ħajja ta 'Servizz twil

Rata ta' Falliment Baxxa

Naqqas il-Labour

Telekomunikazzjoni
| Oġġett | Firxa | Firxa | Veloċità massima | ||
| Master Arm | Fuq | Wiċċ tal-immuntar għad-distanza tal-puplesija 1146mm | 38° | puplesija: 25/305/25 (mm) | |
| Keffa | 98° | ||||
| Tmiem | J4 | ± 360° | (Tagħbija/Ritmu ċikliku) 0kg/150time/min、3kg/150time/min、5kg/130time/min、8kg/115time/min | ||
| Tul tad-driegħ (mm) | Kapaċità tat-Tagħbija (kg) | Preċiżjoni tal-Pożizzjonament Ripetut (mm) | Sors tal-Enerġija (kVA) | Piż (kg) | |
| 1600 | 8 | ±0.1 | 6.36 | 256 | |

BRTIRPL1608A huwa r-riżultat ta 'snin ta' riċerka u żvilupp estensivi mit-tim ta 'inġiniera b'esperjenza ta' BORUNTE. Billi użaw l-għarfien espert tagħhom fir-robotika u l-awtomazzjoni, huma għelbu diversi sfidi tekniċi biex joħolqu robot li jissodisfa l-ħtiġijiet li dejjem jevolvu tal-industriji moderni. Il-proċess ta 'żvilupp involva ttestjar, ottimizzazzjoni u rfinar rigorużi biex jiġu żgurati l-ogħla standards ta' prestazzjoni, affidabilità u sikurezza.
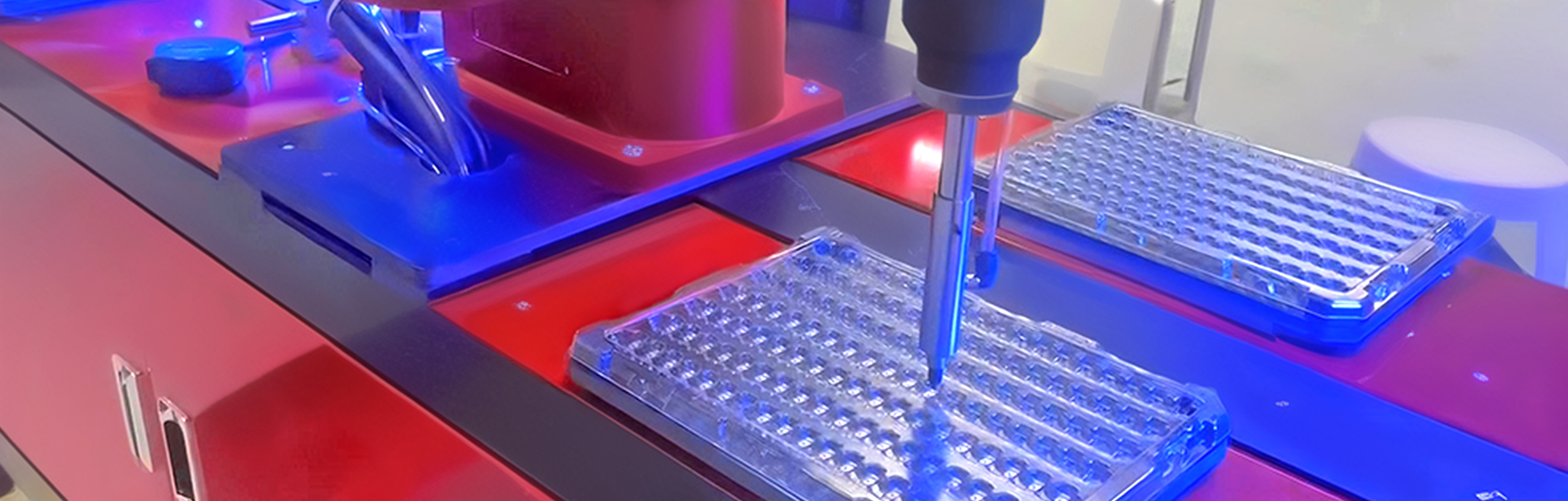
1. Pick-and-Post:Ir-Robot Parallel ta 'Erbgħa Assi jeċċella f'operazzjonijiet ta' pick-and-place, jimmaniġġja b'mod effiċjenti oġġetti ta 'daqsijiet u forom li jvarjaw. Il-movimenti preċiżi u l-veloċità mgħaġġla tiegħu jippermettu għażla, stivar u trasferiment rapidu ta 'oġġetti, inaqqsu x-xogħol manwali u jtejbu l-produttività.
2. Assemblea: Bil-preċiżjoni għolja u l-versatilità tiegħu, dan ir-robot huwa għażla eċċellenti għall-kompiti ta 'assemblaġġ. Jista 'jimmaniġġja bla difetti komponenti kkomplikati, u jiżgura allinjament preċiż u konnessjonijiet sikuri. Ir-Robot Parallel b'Erbgħa Assi jissimplifika l-proċessi ta 'assemblaġġ, li jirriżulta f'kontroll tal-kwalità mtejjeb u ħin ta' assemblaġġ imnaqqas.
3. Ippakkjar: Il-veloċità mgħaġġla tar-robot u l-movimenti preċiżi jagħmluha ideali għall-applikazzjonijiet tal-ippakkjar. Jista' jippakkja prodotti malajr f'kaxxi, ċestuni jew kontenituri, u jiżgura tqegħid konsistenti u jimminimizza l-iżbalji tal-ippakkjar. Ir-Robot Parallel b'Erbgħa Assi jottimizza l-effiċjenza tal-ippakkjar u jappoġġja produzzjoni ta 'volum għoli.
1. Kif nista 'nintegra r-Robot Parallel ta' Erba 'Assi fil-linja ta' produzzjoni eżistenti tiegħi?
BORUNTE jipprovdi appoġġ komprensiv għall-integrazzjoni. It-tim ta 'esperti tagħna se jaħdem mill-qrib miegħek biex jifhem ir-rekwiżiti tiegħek u jippersonalizza l-integrazzjoni tar-robot biex jidħol bla xkiel fil-linja ta' produzzjoni tiegħek. Ikkuntattja lit-tim tal-bejgħ tagħna għal aktar għajnuna.
2. X'inhi l-kapaċità massima tat-tagħbija tar-robot?
Ir-Robot Parallel b'Erbgħa Assi għandu kapaċità massima ta 'tagħbija ta' 8kg, u jiżgura li jista 'jimmaniġġja firxa wiesgħa ta' oġġetti u materjali b'mod effiċjenti.
3. Jista' r-robot jiġi pprogrammat biex iwettaq ħidmiet kumplessi?
Assolutament! Ir-robot industrijali tal-issortjar parallel awtomatiku jiġi b'kapaċitajiet avvanzati ta 'programmazzjoni. Jappoġġja diversi lingwi ta' programmar u joffri interface faċli għall-utent biex tipprogramma kompiti kumplessi b'faċilità. It-tim ta 'appoġġ tekniku tagħna huwa disponibbli biex jgħinek fl-ipprogrammar tar-robot għall-applikazzjoni speċifika tiegħek.
Applikazzjonijiet għal Robots ta' Stacking ta' Tagħbija Tqila:
Palletizing, depalletizing, ġbir ta 'ordnijiet, u ħidmiet oħra kollha jistgħu jitwettqu minn robots ta' stivar ta 'tagħbija tqila. Huma joffru metodu prattiku għall-ġestjoni ta 'tagħbijiet kbar, u jistgħu jiġu utilizzati biex awtomatizzati bosta proċessi manwali, inaqqsu d-domanda għax-xogħol tal-bniedem u jgħollu l-produttività. Robots ta 'stivar ta' tagħbija tqila huma wkoll spiss użati fil-produzzjoni ta 'karozzi, l-ipproċessar ta' ikel u xorb, u loġistika u distribuzzjoni.


-
Trasport
-
Issortjar
-

Sejbien
-
Viżjoni
Kategoriji ta' prodotti





Integraturi BORUNTE u BORUNTE
Fl-ekosistema BORUNTE, BORUNTE huwa responsabbli għall-R&D, il-produzzjoni, u l-bejgħ ta 'robots u manipulaturi. L-integraturi tal-BORUNTE jużaw il-vantaġġi tal-industrija jew tal-qasam tagħhom biex jipprovdu disinn, integrazzjoni u servizz ta 'wara l-bejgħ tal-applikazzjoni terminali għall-prodotti BORUNTE li jbiegħu. L-integraturi tal-BORUNTE u tal-BORUNTE jissodisfaw ir-responsabbiltajiet rispettivi tagħhom u huma indipendenti minn xulxin, u jaħdmu flimkien biex jippromwovu l-futur sabiħ tal-BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Provinċja ta 'Guangdong, Ċina
- borunterobotcoltd@gmail.com



Kompensatur tal-pożizzjoni tal-forza axjali, Magħżel pnewmatiku li jżomm f'wiċċ l-ilma, Splitter mhux manjetiku, Sistema viżwali 2D, Tazzi tal-ġbid tal-isponoż, Magħżel elettriku li jżomm f'wiċċ l-ilma pnewmatiku,
-

vr
-

email
-

Telefon
-

Whatsapp
-

Fuq