



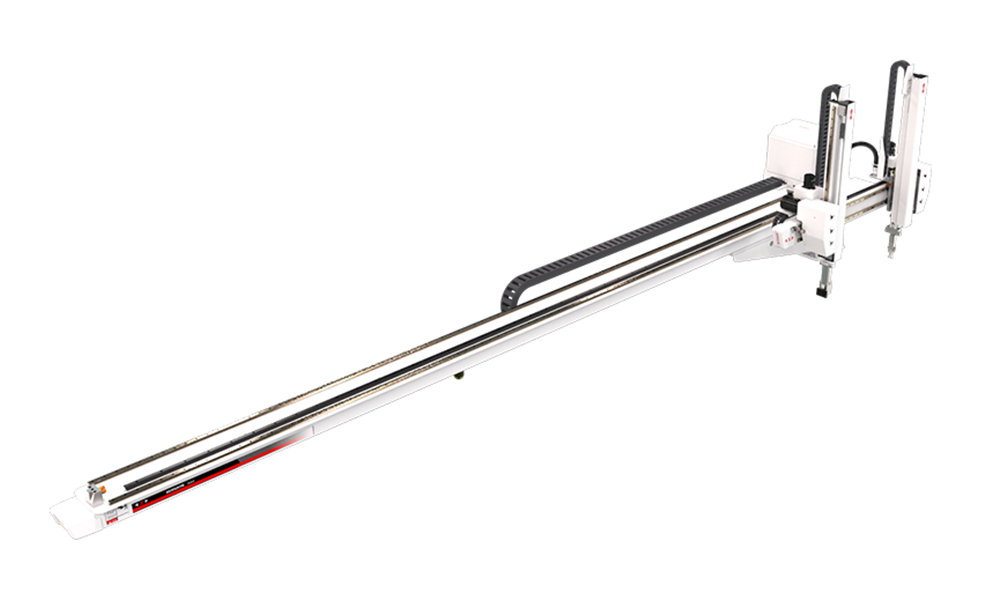
Siri BRTV13WDS5P0/F0 terpakai kepada semua jenis julat mesin suntikan mendatar 320T-700T untuk produk bawa keluar dan sprue. Pemasangannya berbeza daripada robot rasuk tradisional, produk diletakkan di hujung mesin pengacuan suntikan. Ia mempunyai lengan berganda. Lengan menegak ialah peringkat teleskopik dan lejang menegak ialah 1300mm. Pemacu servo AC lima paksi. Selepas pemasangan, ruang pemasangan ejector boleh dijimatkan sebanyak 30-40%, dan loji boleh digunakan dengan lebih lengkap membolehkan penggunaan ruang pengeluaran yang lebih baik, produktiviti akan meningkat sebanyak 20-30%, mengurangkan kadar kecacatan, memastikan keselamatan pengendali, mengurangkan tenaga kerja dan mengawal pengeluaran dengan tepat untuk mengurangkan sisa. Sistem bersepadu pemacu dan pengawal lima paksi: talian isyarat yang lebih sedikit, komunikasi jarak jauh, prestasi pengembangan yang baik, keupayaan anti-gangguan yang kuat, ketepatan kedudukan yang berulang yang tinggi, boleh mengawal berbilang paksi secara serentak, penyelenggaraan peralatan mudah dan kadar kegagalan yang rendah.

Kedudukan Tepat

Cepat

Hayat Perkhidmatan yang Panjang

Kadar Kegagalan yang Rendah

Kurangkan Buruh

Telekomunikasi
| Sumber Kuasa (kVA) | IMM yang disyorkan (tan) | Dipandu Traverse | Model EOAT |
| 3.40 | 320T-700T | Motor Servo AC | dua sedutan dua lekapan |
| Lejang Lintas (mm) | Lejang Melintang (mm) | Lejang Menegak (mm) | Max.loading (kg) |
| Gerbang mendatar dengan jumlah panjang kurang daripada 6 meter | belum selesai | 1300 | 8 |
| Masa Keluar Kering (saat) | Masa Kitaran Kering (saat) | Penggunaan Udara (NI/kitaran) | Berat (kg) |
| 2.3 | belum selesai | 9 | Tidak standard |
Perwakilan model: W:Jenis teleskopik. D:Lengan produk + lengan pelari. S5: Lima paksi didorong oleh AC Servo Motor (Traverse-axis、Vertical-axis+ Crosswise-axis).
Masa kitaran yang dinyatakan di atas adalah keputusan standard ujian dalaman syarikat kami. Dalam proses permohonan sebenar mesin, mereka akan berbeza mengikut operasi sebenar.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | belum selesai | belum selesai | belum selesai | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | belum selesai | belum selesai | 253.5 | 399 | belum selesai | 549 | belum selesai |
| Q | |||||||
| 1300 | |||||||
Tiada notis lanjut jika spesifikasi dan penampilan diubah atas sebab penambahbaikan dan lain-lain. Terima kasih kerana memahami.

1. Suis Negeri
Loket pengajaran lengan manipulator acuan suntikan plastik mempunyai tiga status: Manual, Berhenti dan Auto. [Manual]: Untuk memasuki mod Manual, gerakkan suis keadaan ke kiri. [Berhenti]: Untuk memasuki keadaan Berhenti, alihkan suis keadaan ke tengah. Parameter boleh ditetapkan dalam peringkat ini. [Auto]: Untuk memasuki keadaan Auto, alihkan suis keadaan ke tengah. Tetapan automatik dan sepadan boleh dilakukan dalam keadaan ini.
2. Butang Fungsi
Butang [Mula]:
Fungsi 1: Dalam mod Auto, tekan "Mula" untuk memulakan manipulator secara automatik.
Fungsi 2: Dalam keadaan Berhenti, tekan "Asal" dan kemudian "Mula" untuk memulihkan manipulator kepada asal.
Fungsi 3: Dalam keadaan Berhenti, tekan "HP" dan kemudian "Mula" untuk menetapkan semula asal manipulator.
Butang [Berhenti]:
Fungsi 1: Dalam mod Auto, tekan "Berhenti" dan aplikasi akan berhenti apabila modul telah selesai. Fungsi 2: Apabila amaran berlaku, ketik "Berhenti" dalam mod Auto untuk memadam paparan penggera yang diselesaikan.
Butang [Asal]: Ia hanya terpakai untuk tindakan perumah. Sila rujuk Bahagian 2.2.4 "Kaedah Homing".
Butang [HP]: Tekan "HP" dan kemudian "Mula, semua paksi akan ditetapkan semula mengikut urutan Y1, Y2 Z, X1 dan X2, Y1 dan Y2 akan kembali ke 0, dan Z, X1 dan X2 akan kembali ke permulaan kedudukan program.
Butang [Speed Up/Down]: Kedua-dua butang ini boleh digunakan untuk melaraskan kelajuan global dalam keadaan Manual dan Auto.
Butang [Berhenti Kecemasan]: Dalam keadaan kecemasan, menekan butang "Berhenti Kecemasan" akan mematikan semua paksi dan membunyikan amaran "Berhenti Kecemasan". Selepas mengeluarkan tombol, tekan kekunci "Berhenti" untuk menyenyapkan penggera.

-

Pengacuan Suntikan
Kategori produk
-
Manipulator servo ketepatan tinggi lima paksi BRTV0...
-

Robot suntikan pengacuan industri linear BRTR0...
-

Manipulator berkelajuan tinggi untuk suntikan acuan BRTR0...
-

Manipulator industri linear servo AC BRTR09WD...
-

Manipulator suntikan servo AC lima paksi BRTR13...
-

Manipulator Robot Cartesian Kelajuan Pantas BRTR17WD...
Penyepadu BORUNTE dan BORUNTE
Dalam ekosistem BORUNTE, BORUNTE bertanggungjawab untuk R&D, pengeluaran dan penjualan robot dan manipulator. Penyepadu BORUNTE menggunakan kelebihan industri atau bidang mereka untuk menyediakan reka bentuk aplikasi terminal, penyepaduan dan perkhidmatan selepas jualan untuk produk BORUNTE yang mereka jual. Penyepadu BORUNTE dan BORUNTE memenuhi tanggungjawab masing-masing dan bebas antara satu sama lain, bekerjasama untuk mempromosikan masa depan BORUNTE yang cerah.
- Tel:+86-400-870-8989
- NO.83, Jalan Shafu, Kampung Shabu, Bandar Dalang, Bandar Dongguan, Wilayah Guangdong, China
- borunterobotcoltd@gmail.com



Cawan sedut span, Sistem visual 2D, Pemampas kedudukan daya paksi, Gelendong pneumatik terapung pneumatik, gelendong elektrik terapung pneumatik, Pembahagi bukan magnet,
-

vr
-

emel
-

telefon
-

Whatsapp
-

Atas