BRTIRPH1210A ass e sechs-Achs Roboter entwéckelt vu BORUNTE fir d'Schweiß-, Entburring- a Schleifapplikatiounsindustrie. Et ass kompakt a Form, kleng a Gréisst, liicht a Gewiicht, mat enger maximaler Belaaschtung vun 10kg an engem Armspann vun 1225mm. Säin Handgelenk adoptéiert eng huel Struktur, déi d'Verdrahtung méi bequem an d'Bewegung méi flexibel mécht. Déi éischt, zweet an drëtt Gelenker sinn all mat héich Präzisioun Reduzéierer equipéiert, an déi véiert, fënneften a sechsten Gelenker sinn all mat héich-Präzisioun Gang Strukturen equipéiert. D'High-Speed Joint Geschwindegkeet erméiglecht flexibel Operatioun. De Schutzgrad erreecht IP54. Staubdicht a waasserdicht. D'Widderhuelungspositionéierungsgenauegkeet ass ± 0,07 mm.

Genau Positionéierung

Schnell

Laang Service Liewen

Niddereg Echec Taux

Aarbechtsmaart reduzéieren

Telekommunikatioun
| Artikel | Range | Max Geschwindegkeet | ||
| Arm | J1 | ± 165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ± 80° | 185°/s | ||
| Handgelenk | J4 | ± 155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ± 360° | 461°/s | ||
|
| ||||
| Armlänge (mm) | Ladefäegkeet (kg) | Widderholl Positionéierungsgenauegkeet (mm) | Energiequelle (kVA) | Gewiicht (kg) |
| 1225 | 10 | ± 0,07 | 4.30 | 155  1. Wat sinn d'Virdeeler vum Kaf vun engem professionelle Polierroboterarm? BORUNTE poléieren industriell Roboteren kënnen d'Produktiounseffizienz verbesseren, d'Produktqualitéit verbesseren, d'Aarbechtskäschte reduzéieren an d'mënschlech Feelerrisiken reduzéieren, et kann an héijer Temperatur, schiedleche Gas an aner Ëmfeld schaffen fir e méi séchert Aarbechtsëmfeld ze bidden. 2. Wéi wielen ech e poléierend industrielle Roboter deen Äre Besoinen passt? Wann Dir e Roboter auswielt, sollten déi folgend Faktore berücksichtegt ginn: Aarbechtsbelaaschtung, Aarbechtsberäich, Genauegkeetsufuerderungen, Aarbechtsgeschwindegkeet, Sécherheetsfuerderunge, Programméierungs- an Operatiounseinfachheet, Ënnerhaltfuerderungen a Budgetsbeschränkungen. Gläichzäiteg sollen och Konsultatiounen mat Fournisseuren a Fachleit gefouert ginn fir méi detailléiert Virschléi ze kréien. Bedeitend Feature vum professionnelle poléierende Roboterarm: 1. Präzisioun a Widderhuelbarkeet: Polieraarbecht erfuerdert typesch héich präzis Bewegung a konsequent Operatioun. Industrieroboter kënne mat Millimeterniveau Genauegkeet positionéieren a kontrolléieren, fir konsequent Resultater an all Operatioun ze garantéieren. 2. Automatisatioun an Effizienz: Ee vun den Haaptzwecker vun industrielle Roboteren ass d'Produktiounseffizienz ze verbesseren. De Polierprozess ass normalerweis ëmständlech an Zäitopwendeg, awer Roboter kënnen Aufgaben op eng séier a konsequent Manéier ausféieren, an doduerch d'Gesamteffizienz vun der Produktiounslinn verbesseren. 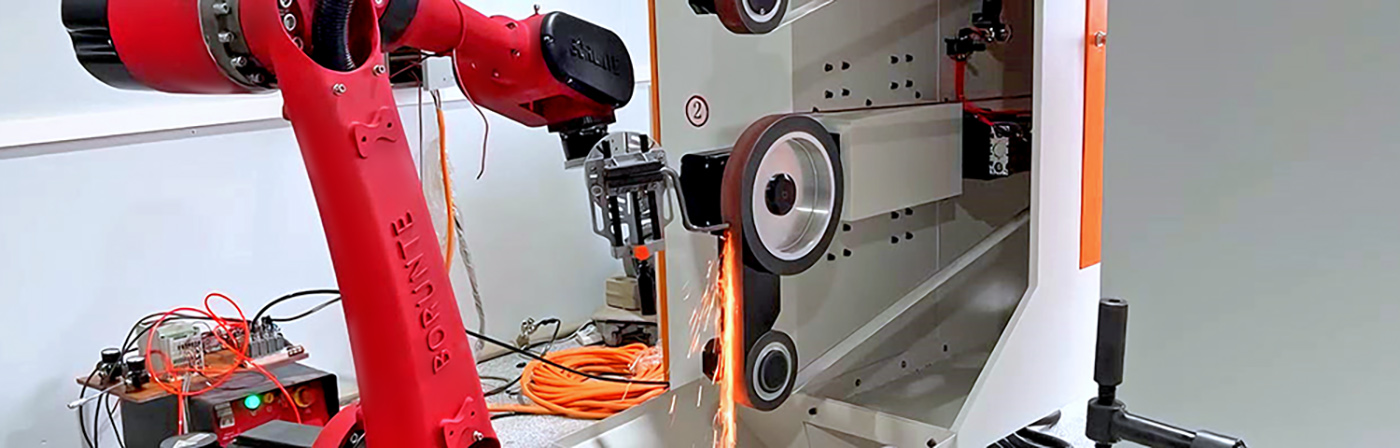  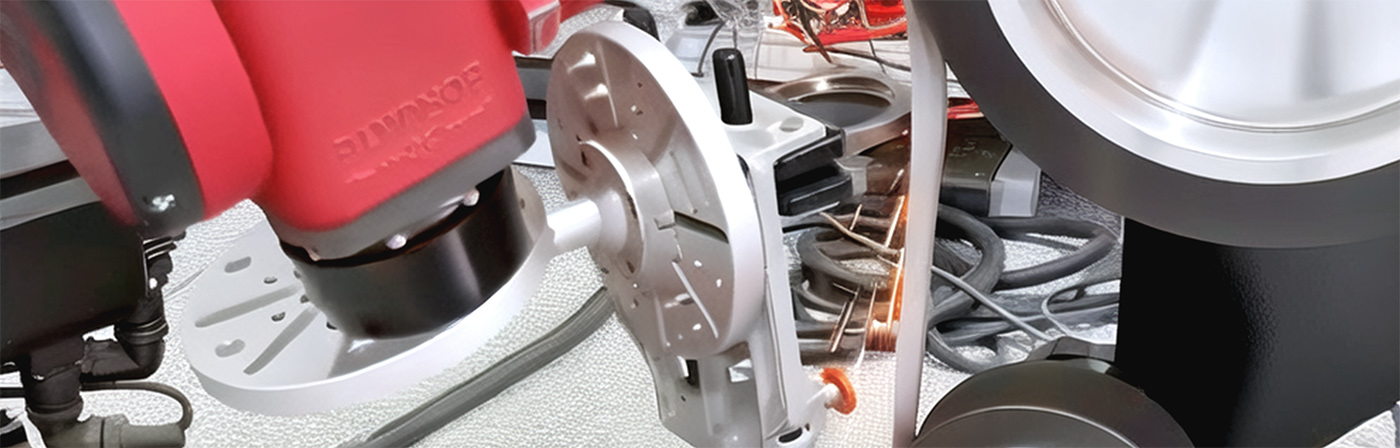 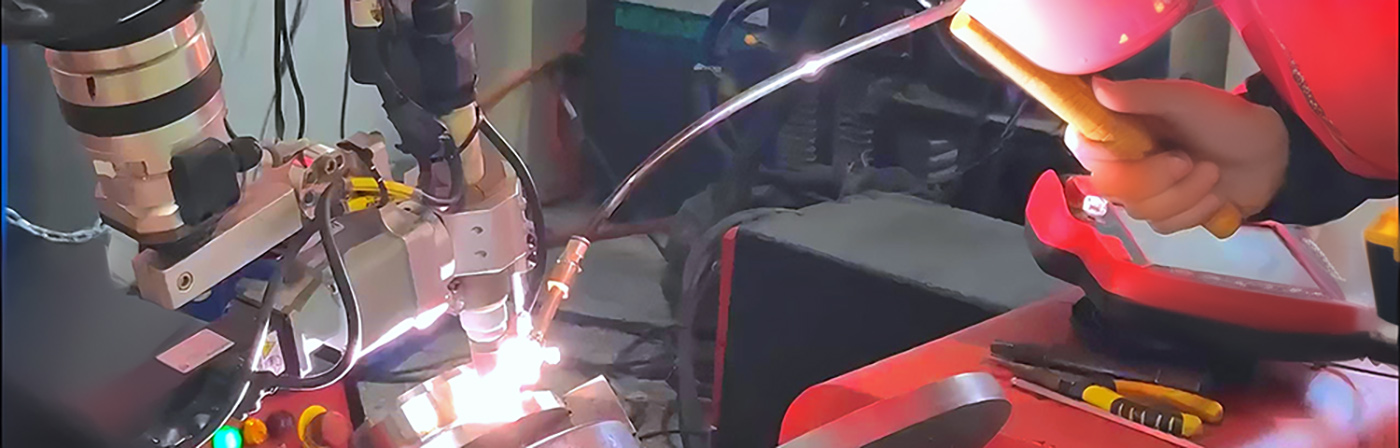
Produit KategorienBORUNTE an BORUNTE IntegratorenAm BORUNTE Ökosystem ass BORUNTE verantwortlech fir d'R&D, d'Produktioun a Verkaf vu Roboteren a Manipulatoren. BORUNTE Integratoren benotzen hir Industrie- oder Feldvirdeeler fir Terminal Uwendungsdesign, Integratioun an After-Sales Service fir d'BORUNTE Produkter déi se verkafen. BORUNTE a BORUNTE Integratoren erfëllen hir jeeweileg Verantwortung a sinn onofhängeg vuneneen, schaffen zesummen fir déi hell Zukunft vu BORUNTE ze förderen.
© Copyright - 2010-2024 : All Rechter reservéiert.Sitemap - AMP Mobile Pneumatesch schwiewend pneumatesch Spindel, Schwamm Saugbecher, Pneumatesch schwiewend elektresch Spindel, Axial Kraaft Positioun Kompensator, Net magnetesche Splitter, 2D visuell System,
|