




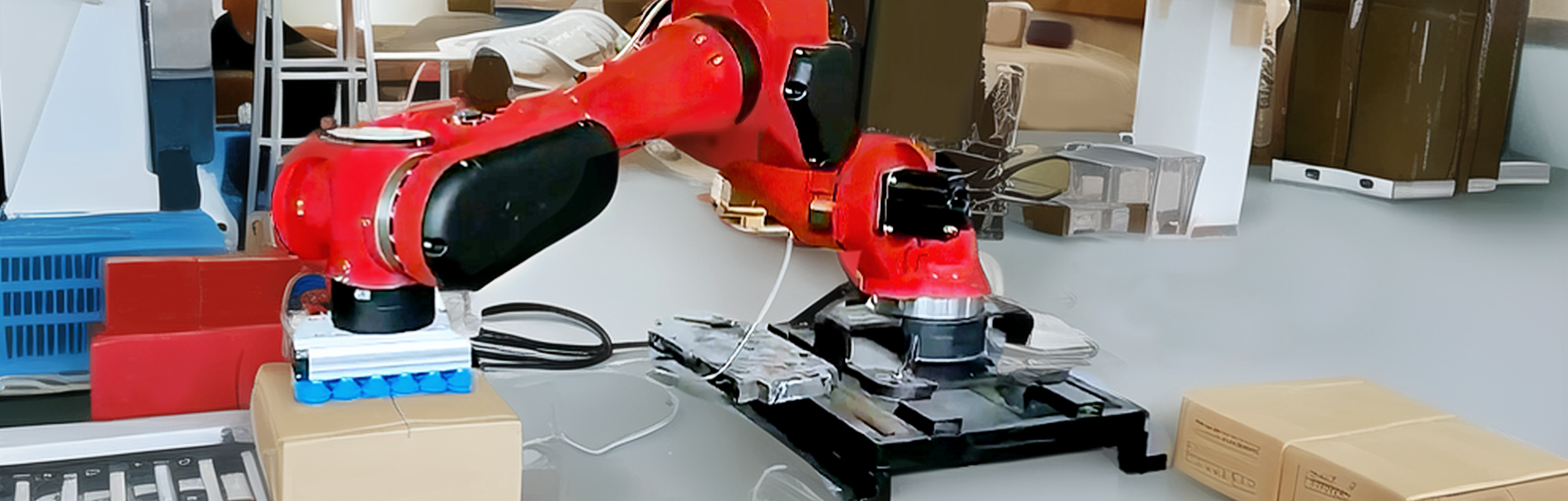
BRTIRPL1608A Typ Roboter ass e Véierachs Roboter dee vum BORUNTE entwéckelt gouf fir Montage, Sortéierung an aner Uwendungsszenarie vu Liicht, kleng a verspreet Materialien. Déi maximal Aarmlängt ass 1600mm an déi maximal Belaaschtung ass 8KG. De Schutzgrad erreecht IP40. D'Widderhuelungspositionéierungsgenauegkeet ass ± 0,1 mm.

Genau Positionéierung

Schnell

Laang Service Liewen

Niddereg Echec Taux

Aarbechtsmaart reduzéieren

Telekommunikatioun
| Artikel | Range | Range | Max Geschwindegkeet | ||
| Master Arm | Ieweschte | Montage Uewerfläch zu Schlag Distanz 1146mm | 38° | Schlag: 25/305/25(mm) | |
| Hem | 98° | ||||
| Enn | J4 | ± 360° | (Cyclesch Belaaschtung / Rhythmus) 0 kg / 150 Zäit / min, 3 kg / 150 Zäit / min, 5 kg / 130 Zäit / min, 8 kg / 115 Zäit / min | ||
| Armlänge (mm) | Ladefäegkeet (kg) | Widderholl Positionéierungsgenauegkeet (mm) | Energiequelle (kVA) | Gewiicht (kg) | |
| 1600 | 8 | ± 0,1 | 6,36 | 256 | |

BRTIRPL1608A ass d'Resultat vu Joere vun extensiv Fuerschung an Entwécklung vum BORUNTE Team vun erfuerene Ingenieuren. Mat Hëllef vun hirer Expertise an der Robotik an der Automatioun, hu si verschidde technesch Erausfuerderunge iwwerwonne fir e Roboter ze kreéieren deen den ëmmer evoluéierende Bedierfnesser vun de modernen Industrien entsprécht. Den Entwécklungsprozess involvéiert rigoréis Testen, Optimiséierung a Feintuning fir déi héchste Standarde vu Leeschtung, Zouverlässegkeet a Sécherheet ze garantéieren.
1. Pick-and-Place:De Véier-Axis Parallel Roboter exceléiert a Pick-and-Place Operatiounen, effizient Handhabung vun Objete vu verschiddene Gréissten a Formen. Seng präzis Bewegungen a séier Geschwindegkeet erméiglechen eng séier Sortéierung, Stacking an Iwwerdroung vun Elementer, reduzéiert manuell Aarbecht a verbessert Produktivitéit.
2. Assemblée: Mat senger héijer Präzisioun a Villsäitegkeet ass dëse Roboter eng exzellent Wiel fir Montageaufgaben. Et kann komplizéiert Komponenten perfekt handhaben, suergt fir eng korrekt Ausrichtung a sécher Verbindungen. De Four-Axis Parallel Robot streamlines d'Versammlungsprozesser, wat zu enger verbesserter Qualitéitskontroll a reduzéierter Montagezäit resultéiert.
3. Verpakung: Dem Roboter seng séier Geschwindegkeet a präzis Beweegunge maachen et ideal fir Verpackungsapplikatiounen. Et ka séier Produkter a Këschten, Këschten oder Container packen, fir konsequent Plazéierung ze garantéieren an Verpakungsfehler ze minimiséieren. De Four-Axis Parallel Robot optiméiert d'Verpakungseffizienz an ënnerstëtzt d'High-Volumenproduktioun.
1. Wéi kann ech de Four-Axis Parallel Roboter an meng bestehend Produktiounslinn integréieren?
BORUNTE stellt ëmfaassend Integratioun Ënnerstëtzung. Eist Team vun Experten schafft enk mat Iech zesummen fir Är Ufuerderungen ze verstoen an d'Integratioun vum Roboter unzepassen fir nahtlos an Är Produktiounslinn ze passen. Kontaktéiert eis Verkafsteam fir weider Hëllef.
2. Wat ass déi maximal Notzlaaschtkapazitéit vum Roboter?
De Véier-Axis Parallel Roboter huet eng maximal Notzlaaschtkapazitéit vun 8 kg, wat garantéiert datt et eng breet Palette vun Objeten a Materialien effizient handhaben kann.
3. Kann de Roboter programméiert ginn fir komplex Aufgaben ze maachen?
Absolut! Automatesch parallel Zortéieren industriell Roboter kënnt mat fortgeschratt programméiere Kënnen. Et ënnerstëtzt verschidde Programméierungssproochen a bitt e userfrëndlechen Interface fir komplex Aufgaben mat Liichtegkeet ze programméieren. Eis technesch Ënnerstëtzung Team ass verfügbar fir Iech beim Programméiere vum Roboter fir Är spezifesch Applikatioun ze hëllefen.
Uwendungen fir Heavy Loading Stacking Roboter:
Palletizing, Depalletizing, Commande Picking, an aner Aufgaben kënnen all duerch schwéier Luede Stacking Roboteren ausgefouert ginn. Si bidden eng praktesch Method fir grouss Lasten ze managen, a si kënne benotzt ginn fir vill manuell Prozesser ze automatiséieren, d'Nofro fir mënschlech Aarbecht ze senken an d'Produktivitéit ze erhéijen. Heavy Lading Stacking Roboter ginn och dacks an der Produktioun vun Autoen, der Veraarbechtung vu Liewensmëttel a Gedrénks, a Logistik a Verdeelung benotzt.


-
Transport
-
Sortéieren
-

Detektioun
-
Visioun





BORUNTE an BORUNTE Integratoren
Am BORUNTE Ökosystem ass BORUNTE verantwortlech fir d'R&D, d'Produktioun a Verkaf vu Roboteren a Manipulatoren. BORUNTE Integratoren benotzen hir Industrie- oder Feldvirdeeler fir Terminal Uwendungsdesign, Integratioun an After-Sales Service fir d'BORUNTE Produkter déi se verkafen. BORUNTE a BORUNTE Integratoren erfëllen hir jeeweileg Verantwortung a sinn onofhängeg vuneneen, schaffen zesummen fir déi hell Zukunft vu BORUNTE ze förderen.
- Tel: +86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Axial Kraaft Positioun Kompensator, Pneumatesch schwiewend pneumatesch Spindel, Net magnetesche Splitter, 2D visuell System, Schwamm Saugbecher, Pneumatesch schwiewend elektresch Spindel,
-

vr
-

Email
-

Telefon
-

Whatsapp
-

Top