BRTIRPH1210A sex axis roboti a BORUNTE explicatus est ad applicationem industriarum glutino, deburendo et stridorum applicatione. Constat in figura, magnitudine parva, levi pondere, cum maximo onere 10 kg et brachii 1225mm. Carpum eius structuram cavam adhibet, quae filum commodiorem et motum flexibilem reddit. Primus, secundus et tertius articuli omnes summa subtilitate redactores sunt instructi, et quartus, quintus et sextus articulis omnibus structurae structuris summa subtilitate instructi sunt. Summus celeritas iuncturam celeritatem flexibilem efficit operationem. Tutela gradus ad IP54. Pulvis-probatio et probatio aquarum. Accuratio iteratio positionis ±0.07mm est.

Accurate Positioning

Ieiunium

Long Service Vita

Minimum culpa Rate

Labor minuere

Telecommunication
| Item | Range | Max celeritas | ||
| Arm | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Carpi | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ± 360° | 461°/s | ||
|
| ||||
| Brachium Longitudo (mm) | Facultates loading (kg) | Repetita Positioning accuratius (mm) | Potentia Source (kVA) | Pondus (kg) |
| 1225 | 10 | ±0.07 | 4.30 | 155  1. Quae sunt beneficia acquirendi professionalem expolitionem brachii robotici? BORUNTE expolitio industrialis robots productionem efficientiam emendare potest, productam qualitatem emendare, laborem minuere et periculorum humanorum errorum, in caliditate, in noxio gas aliisque ambitibus laborare potest, ut tutius opus environment. 2. Quomodo eligere robot expolitionem industrialem quae necessitates tuas decet? Cum robot eligendo, factores sequentes considerari debent: quod inposuit, operis spatium, accurate requisita, celeritas opus, salus requisita, programmatio et simplicitas perficiendi, sustentatio requisita et angustiae budget. Eodem tempore consultationes cum instructoribus et doctoribus adhibeantur ut suggestiones accuratiores habeantur. Notae lineamenta Professionalis expolitio brachii robotici; 1. Precision and repeatability: politio operis typice postulat motum valde accuratum et operationem constantem. Industriae robots situm ac temperare cum gradu millimetro accurate possunt, congruentes eventus in omni operatione procurantes. 2. Automatio et efficientia: Una praecipuorum robotorum industrialium proposita est efficientiam productionis emendare. Processus poliendi plerumque gravia ac tempus consumens est, sed robots munus facere possunt celeriter et constanti modo, ita ut altiorem efficiendi lineam efficientiam augeat. 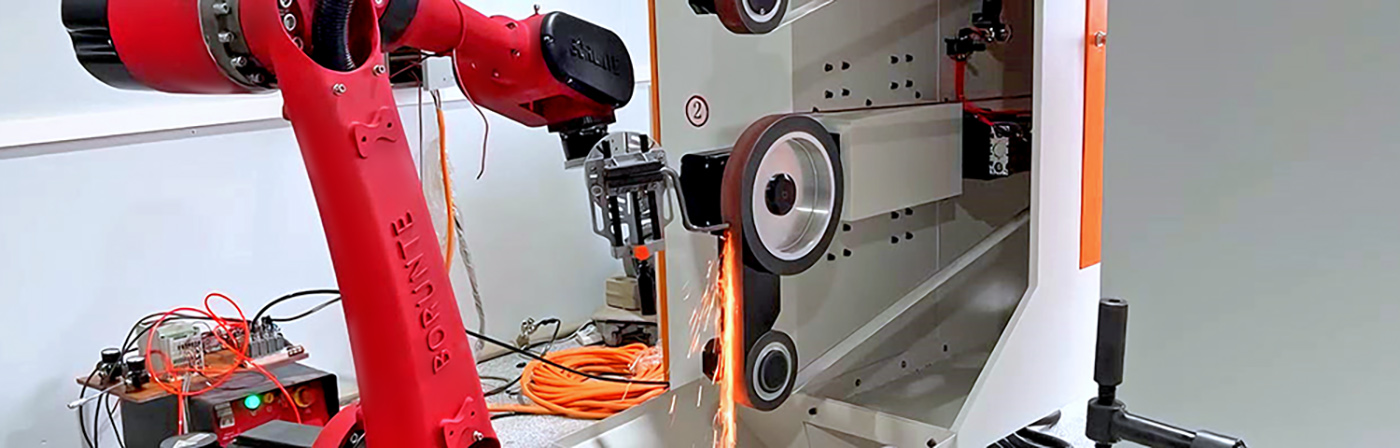  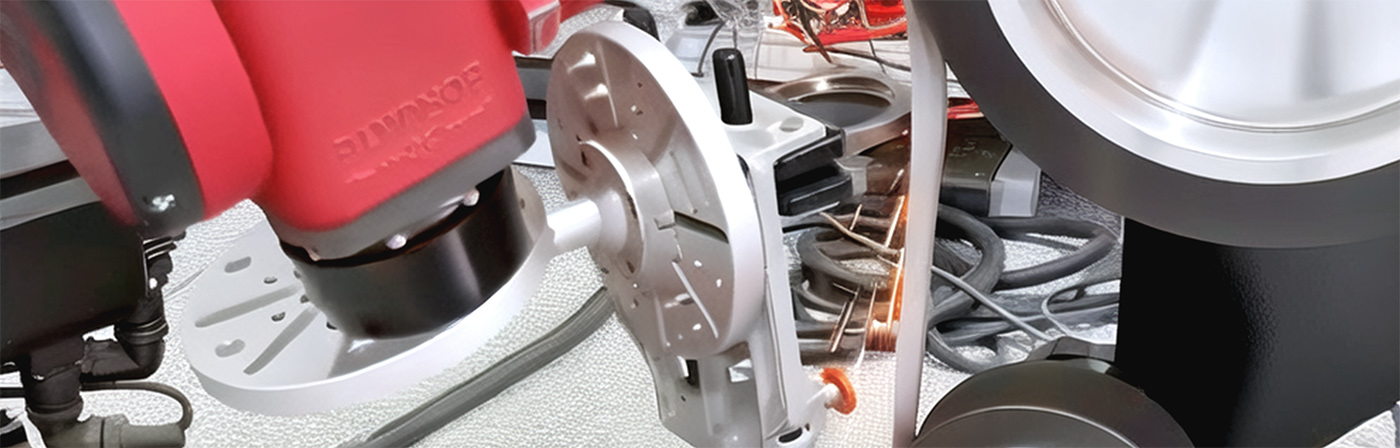 
Products categoriesBORUNTE et BORUNTE integratoresIn ecosystem BORUNTE, BORUNTE auctor est R&D, productionis et venditio robotorum et manipulatorum. BORUNTE integratores industriam suam vel agrum commoda utantur ad applicationem terminalis consilii, integrationis, et post-venditionem servitii in BORUNTE producta vendunt. BORUNTE et BORUNTE integratores suas quisque officia complent et ab invicem independentes sunt, adiuvantes ut clara futura BORUNTE promoveant.
© Copyright - 2010-2024 : All Rights Reserved.Sitemap - AMP Mobile Fusum pneumaticum fluitans pneumaticum, Spongia cyathos suctionis, Pneumatica fluitantia electrica fusum, Compensator axialem vim positionis, Non magneticus SCHISMATICUS, 2D systema visualium,
|