




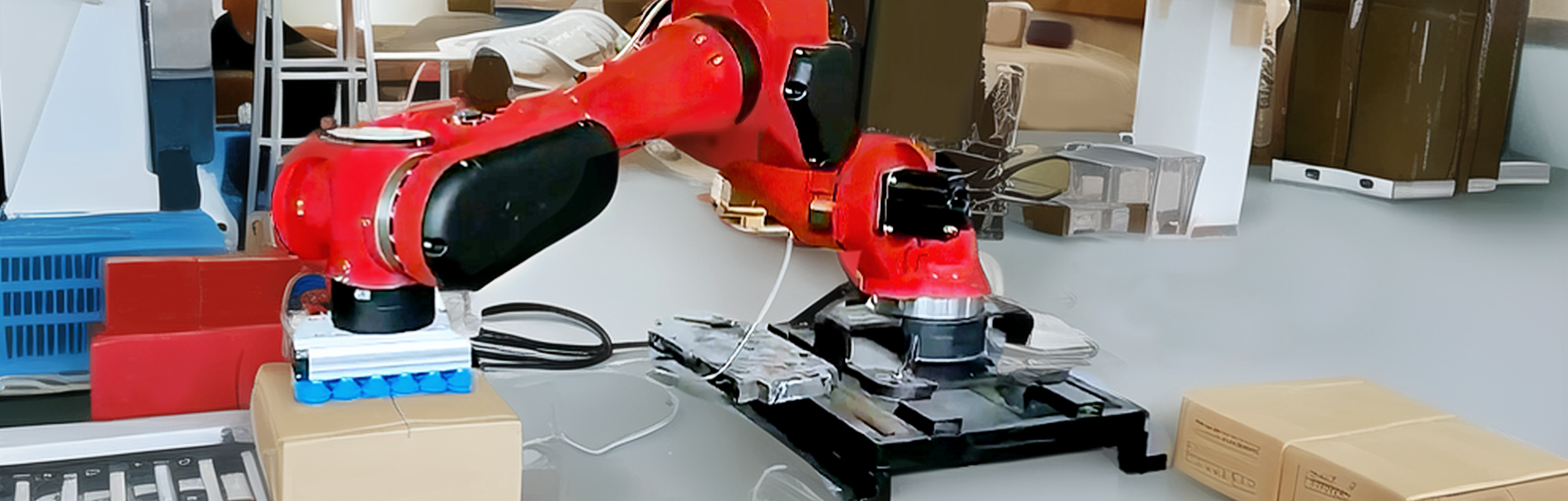
BRTIRPL1608A genus roboti est robot axis quattuor, qui a BORUNTE evolvit ad conventum, voluptua et alias applicationes missionum lucis, materiae parvae et dispersae. Brachium maximum 1600mm longitudo est et maximum onus 8KG est. Gradus tutelae ad IP40. Accuratio iteratio positionis ±0.1mm est.

Accurate Positioning

Ieiunium

Long Service Vita

Minimum culpa Rate

Labor minuere

Telecommunication
| Item | Range | Range | Max celeritas | ||
| Magister Arm | superior | Ascendens superficies ad motum spatium 1146mm | 38° | plaga:25/305/25(mm) | |
| Hem | 98° | ||||
| End | J4 | ± 360° | (Cyclic loading/Rhythm) 0kg/150time/min、3kg/150time/min、5kg/130time/min、8kg/115time/min | ||
| Brachium Longitudo (mm) | Facultates loading (kg) | Repetita Positioning accuratius (mm) | Potentia Source (kVA) | Pondus (kg) | |
| 1600 | 8 | ±0.1 | 6.36 | 256 | |

BRTIRPL1608A effectus est per annos investigationis et evolutionis magnae per BORUNTE turmam fabrum peritorum. Peritiam suam in roboticis et automationibus levantes, varias technicas provocationes superaverunt ad efficiendum roboti necessitates semper evolutionis recentiorum industriarum. Processus evolutionis involvit strictioris probationis, optimiizationis, et bene-volutionis ut summa signa perficiendi, constantiae et salutis curet.
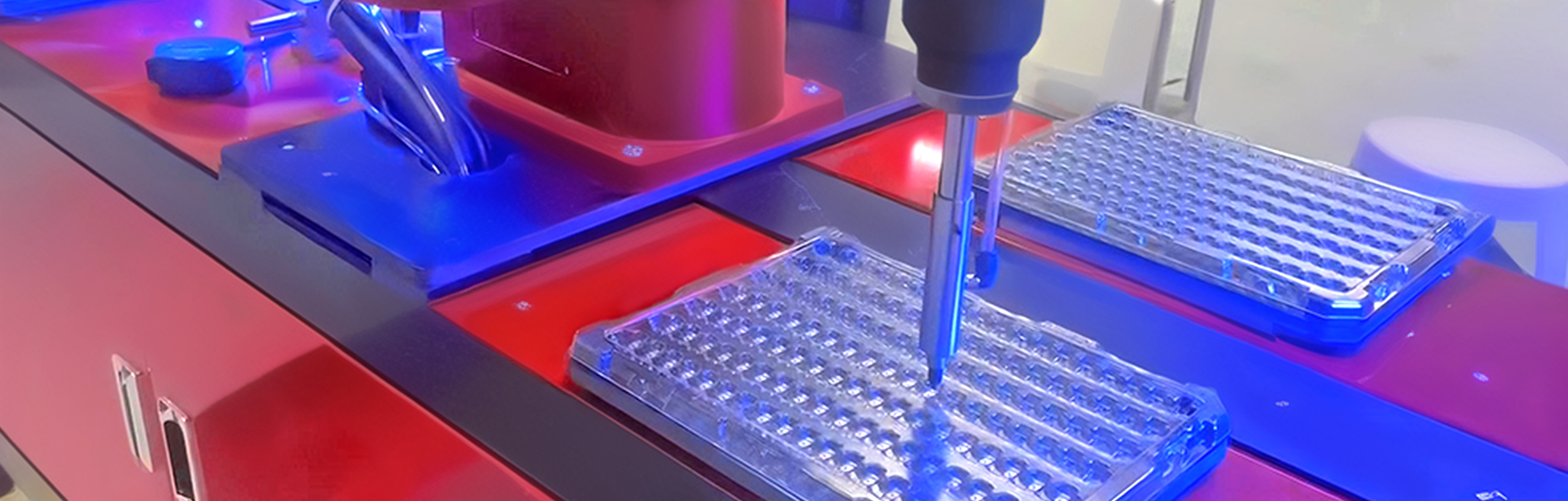
1. Delige-and-Place;Quattuor Axis Parallelis Robot excellit in operationibus pick-locis, obiectis variarum magnitudinum et figurarum efficienter tractandorum. Motus eius praecisus et celeritas celeritas efficit ut celeritas rerum, positis, et translatio rerum, minuendo laborem manualem ac amplificationem efficiat.
2. Conventus; Praeclara haec robot cum sua praecisione et versalitate, optima electio ad opera conventus exercenda est. Artificia intricata emendate tractare potest, ut certae noctis nexus et securos servet. Quattuor-Axis Parallel Robot streamlines processuum conventus, unde in meliorem qualitatem dicionis et conventus temporis deminuti sunt.
3. Packaging: Celeritas celeritatis roboti et motus definiti aptam faciunt applicationum fasciculorum. Potest celeriter sarcina producta in cistas, cratibus, aut vasis, ut convenientem collocationem et errores fasciculos minuentes. Quattuor Axis Parallelis Robot optimizat efficientiam packaging, et sustinet summus volubilis productionis.
1. Quomodo quattuor axem Parallel roboti in linea productionis meae integrare possum?
BORUNTE subsidium integrationis comprehensivae praebet. Manipulus peritorum noster arcte tecum laborabit ut requisita tua cognoscas et integrationem roboti morem facias ut in compagem tuam in linea efficienda apta sit. Contactus turmas venditionesque nostras ad ulteriora subsidia veni.
2. Quod est maximum payload facultatem robot?
Quattuor Axis Parallelis Robot maximam payload capacitatem 8kg habet, ut possit amplis obiectis ac materias efficienter tractare.
3. Potestne robot programmari ad operas multiplices faciendas?
Absolute! Parallelum automatis genus roboti industrialis venit cum facultatibus programmandi provectis. Varias programmandi linguas adiuvat et usorem-amicum interfacies praebet ad programmata opera faciliter composita. Nostra technica subsidii turma praesto est ut te adiuvet in programmando robot ad applicationem specificam.
Applications pro gravibus Stacking Robots Loading:
Palletizing, depallere, ordinem legendo, et alia munia omnia in gravibus onerariis positis robots impleri possunt. Methodum practicam praebent ad magna onera administrandi, et ad automate frequentes processus manuales adduci possunt, exigentiam laboris humani minuentes et productivitatem erigendi. Gravis oneraturae positis robots saepe etiam in autocinetis productionibus, processus cibi et potiones, et logistics et distributiones adhibentur.


-
Transporto
-
Sorting
-

Deprehensio
-
Visio
Products categories





BORUNTE et BORUNTE integratores
In ecosystem BORUNTE, BORUNTE auctor est R&D, productionis et venditio robotorum et manipulatorum. BORUNTE integratores industriam suam vel agrum commoda utantur ad applicationem terminalis consilii, integrationis, et post-venditionem servitii in BORUNTE producta vendunt. BORUNTE et BORUNTE integratores suas quisque officia complent et ab invicem independentes sunt, adiuvantes ut clara futura BORUNTE promoveant.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Urbs, Dongguan urbs, Guangdong Provincia, China
- borunterobotcoltd@gmail.com



Compensator axialem vim positionis, Fusum pneumaticum fluitans pneumaticum, Non magneticus SCHISMATICUS, 2D systema visualium, Spongia cyathos suctionis, Pneumatica fluitantia electrica fusum,
-

vr
-

inscriptio
-

Phone
-

whatsapp
-

Top