
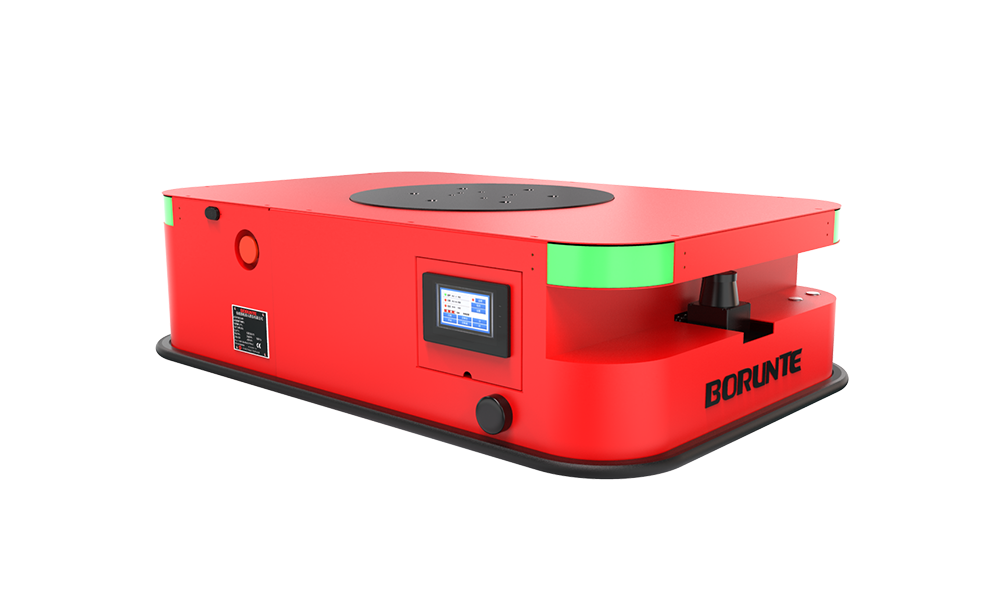



BRTAGV12010A latens in autocineto onerariis robot utens laser SLAM cum QR codice navigationis, cum onere 100kg. Navigatio Laser SLAM et QR code libere switchari possunt ad multarum varietates et ad varia accurationis requisita. In scenis complexis cum multis cautes, QR code pro accurata positione adhibetur, exercendis in cautes ad sarcinas et tractandas. Navigatio laser SLAM in certis scaenae adhibetur, quae solo QR codice non finitur ac libere operari potest.

Accurate Positioning

Ieiunium

Long Service Vita

Minimum culpa Rate

Labor minuere

Telecommunication
| Modus navigationis | Laser SLAM & QR navigationem |
| Repulsi modus | Duo rota differentialis |
| L*W*H | 996mm*646mm*269mm |
| Conversus radii | 550mm |
| Pondus | Circiter 130 kg |
| Ratrd loading | 100kg |
| Terram alvi | 32mm |
| Jacking laminam magnitudine | R=200mm |
| Maximum jacking altitudo | 60mm |
| Morbi laoreet euismod | |
| Negotiatio | ≤3% Clivo |
| Kinematic accurate | ±10 mm |
| Cruise Speed | 1 m/s (≤1.2m/s) |
| Morbi laoreet | |
| Pugna facultatem | 24A·H |
| Continua cursus tempus | ≥8H |
| præcipiens modum | Manuale, Auto |
| Imprimis Equipments | |
| Laser radar | ✓ |
|
|
|
| Subitis subsisto puga | ✓ |
| Orator | ✓ |
| lucerna atmosphaera | ✓ |
| Anti-occursum habena | ✓ |

Sex lineamenta BRTAGV12010A:
1. Autonomus: Robot autocineticus ductor autocineticus sensoriis et systematibus navigandi idoneus est, qui permittit se sine directo potestate humana operari.
2. Flexibilitas: AGV facile potest viae normales navigare ac ad alias vias ut opus est flectere.
3. Efficientia: AGV costs translationem secare potest dum accurationem partus melius auget.
4. Salus: AGV machinas tutelae tuto instruunt ad impediendos collisiones et hominum salutem et alia machinamenta tutanda.
5. Constantia: AGV ad certa officia constanter exerceri possunt.
6. Pugna-powered: AGV technologiae altilium rechargeables utere, eas per pluris temporis spatia laborare quam machinis conventionalibus.
Apparatus sustentationem automatismi provectis ductore robot:
1. Testa et rota universalis ductoris roboti progressi automated semel in mense inspici debet et laser semel in hebdomada cohibendus est. Singulis tribus mensibus, pittacia et tesserae salus experimentum transire debent.
2. Quia rotae pulsis roboti et rotae universalis sunt polyurethane, vestigia relinquent in terra post usum extensum, emundationem exercitationis necessitatis.
3. Corpus roboti purgatio exercitationis subire debet.
4. Ordinarius laser purgatio est necessaria. Robot potest signa agnoscere vel crustae grabatus, si laser non recte servatur; potest etiam in statu necessitatis consistere sine explicatione apparentis.
5. AGV, quae longius tempus protracta sunt, cum anti- corrosionibus mensuris, flexis, et altilium semel in mense reponenda est.
6. Calces differentialis planetarum minutor examinandus est ad iniectionem conservandam singulis sex mensibus.
7. Ad ulteriores informationes de apparatu sustentationis consule usorem ducem.



-

CELLA diribitio
-
Loading et unloading
-
Lorem pertractatio




BORUNTE et BORUNTE integratores
In ecosystem BORUNTE, BORUNTE auctor est R&D, productionis et venditio robotorum et manipulatorum. BORUNTE integratores industriam suam vel agrum commoda utantur ad applicationem terminalis consilii, integrationis, et post-venditionem servitii in BORUNTE producta vendunt. BORUNTE et BORUNTE integratores suas quisque officia complent et ab invicem independentes sunt, adiuvantes ut clara futura BORUNTE promoveant.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Urbs, Dongguan urbs, Guangdong Provincia, China
- borunterobotcoltd@gmail.com



Spongia cyathos suctionis, Pneumatica fluitantia electrica fusum, 2D systema visualium, Fusum pneumaticum fluitans pneumaticum, Compensator axialem vim positionis, Non magneticus SCHISMATICUS,
-

vr
-

inscriptio
-

Phone
-

whatsapp
-

Top