
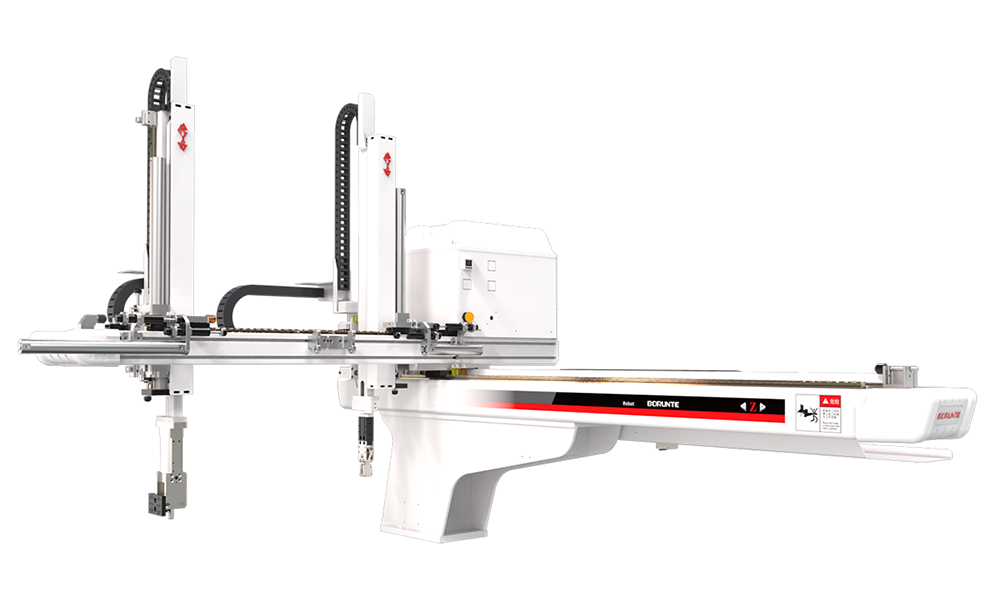



BRTB06WDS1P0/F0 milê robotê gerokê ji bo her cûre rêzikên makîneya derzîlêdanê ya horizontî ya 120T-250T ji bo hilber û sprue derbas dibe. Pergala kontrolê ya yekbûyî ya kontrolkirina ajotinê ya yek-xebat: kêm xetên sînyalê, pêwendiya dûr û dirêj, performansa berfirehkirina baş, şiyana dijî-destwerdana bihêz, rastbûna bilind a pozîsyona dubare, dikare di heman demê de gelek eksê kontrol bike, lênihêrîna alavên hêsan, û kêm têkçûn qûrs.

Positioning Accurate

Zû

Jiyana Xizmeta Dirêj

Rêjeya têkçûna kêm

Kar kêm bikin

Telecommunication
| Çavkaniya Hêzê (KVA) | IMM pêşniyar kirin (ton) | Traverse Driven | Modela EOAT |
| 1.69 | 120T-250T | AC Servo motor | Yek şûştinê yek sazker |
| Derbeya Traverse (mm) | Lêdana Xaçerê (mm) | Lêdana Vertîkal (mm) | Max.loading (kg) |
| 1250 | P:300-R:125 | 800 | 3 |
| Demjimêra Derxistina Hişk (çirk) | Demjimêra zuwa (çirk) | Xerca hewayê (NI/cycle) | Giran (kg) |
| 1.7 | 6.49 | 3.5 | 198 |
Nûnertiya modelê: W: Tîpa teleskopî. D: Destê hilber + milê runner. S5: Pênc-texn ku ji hêla AC Servo Motor ve tê rêve kirin (Text-Traverse, Texne-Vertical + Xaçer-teşe).
Dema çerxa jorîn encamên standarda testa navxweyî ya pargîdaniya me ne. Di pêvajoya serîlêdana rastîn a makîneyê de, ew ê li gorî operasyona rastîn cûda bibin.

| A | B | C | D | E | F | G | H |
| 1340 | 2044 | 800 | 388 | 1250 | 354 | 165 | 210 |
| I | J | K | L | M | N | O | |
| 135 | 475 | 520 | 1190 | 225 | 520 | 1033 |
Ger taybetmendî û xuyang ji ber çêtirbûn û sedemên din were guheztin, bêtir agahdarî tune. Spas ji bo têgihîştina we.

Sazkirina Pergalê BRTB08WDS1P0F0 servo manipulatorê yek eksê
1) Karê têlkirinê divê ji hêla elektrîkê pispor ve were kirin.
2) Berî ku dest bi operasyonê bike, pê ewle bine ku hêz qut bûye.
3) Ji kerema xwe wê li ser maddeyên agirbergir ên mîna metal saz bikin û ji materyalên şewatê dûr bigirin.
4) Dema ku tê bikar anîn divê bi ewlehî were zexm kirin.
5) Ger dabînkirina hêza derveyî ne normal be, dê pergala kontrolê têk biçe. Ji bo ku hûn tevahiya pergalê bi ewlehî bixebitin, ji kerema xwe pê ewle bin ku çerxa ewlehiyê li derveyî pergala kontrolê saz bikin. Manîpulatorê pir eksê şilkirina derzîlêdanê BORUNTE Pergala Kontrolkirina Mêjandina Derzîlêdanê Pir-tex 269.
6) Berî sazkirin, têlkirin, xebitandin û domandin, operator divê bi naveroka vê manualê re nas bike. Di heman demê de pêdivî ye ku bi tevahî zanîna mekanîkî û elektronîkî ya têkildar û hemî tedbîrên ewlehiyê yên têkildar bi tevahî fam bikin.
7) Divê qutiya kontrolê ya elektrîkê ya ji bo sazkirina kontrolkerê baş were hewakirin, rûn-proof û toz-proof be. Ger qutiya kontrolê ya elektrîkê hişk be, dibe ku germahiya kontrolker pir zêde be, ku dê bandorê li xebata normal bike. Ji ber vê yekê, pêdivî ye ku fanek exhaust were saz kirin. Germahiya guncaw di qutiya kontrolê ya elektrîkê de di binê 50 ° C de ye. Li cîhên bi kondensasyon û cemidî neyên bikar anîn.
8) Pêdivî ye ku kontrolker pir nêzikî têkilîker, transformer û alavên din ên AC-ê neyê saz kirin da ku ji destwerdana zêde ya nehewce dûr nekevin. Hişyarî: Desthilatdariya nerast dibe ku bibe sedema xetereyan, di nav de birîna kesane an qezayên makîneyê.

-
Injection molding




BORUNTE û entegrator BORUNTE
Di ekosîstema BORUNTE de, BORUNTE berpirsiyarê R&D, hilberandin û firotina robot û manipulatoran e. Entegratorên BORUNTE pîşesaziyên xwe an avantajên zeviyê bikar tînin da ku sêwirana serîlêdana termînalê, yekbûn û karûbarê piştî firotanê ji bo hilberên BORUNTE ku ew difroşin peyda bikin. Entegratorên BORUNTE û BORUNTE berpirsiyariyên xwe yên têkildar pêk tînin û ji hev serbixwe ne, bi hev re dixebitin ku pêşeroja ronî ya BORUNTE pêşve bibin.
- Tel: + 86-400-870-8989
- NO.83, Rêya Shafu, Gundê Shabu, Bajarê Dalang, Bajarê Dongguan, parêzgeha Guangdong, Chinaîn
- borunterobotcoltd@gmail.com



Splitterê ne magnetîkî, Spîndala elektrîkê ya pneumatîk, sîstema dîtbarî 2D, Spindle pneumatîk herikbar pneumatîk, Kûçikên spongê, Telafîkirina helwesta hêza Axial,
-

vr
-

email
-

Telefon
-

Whatsapp
-

Kop