
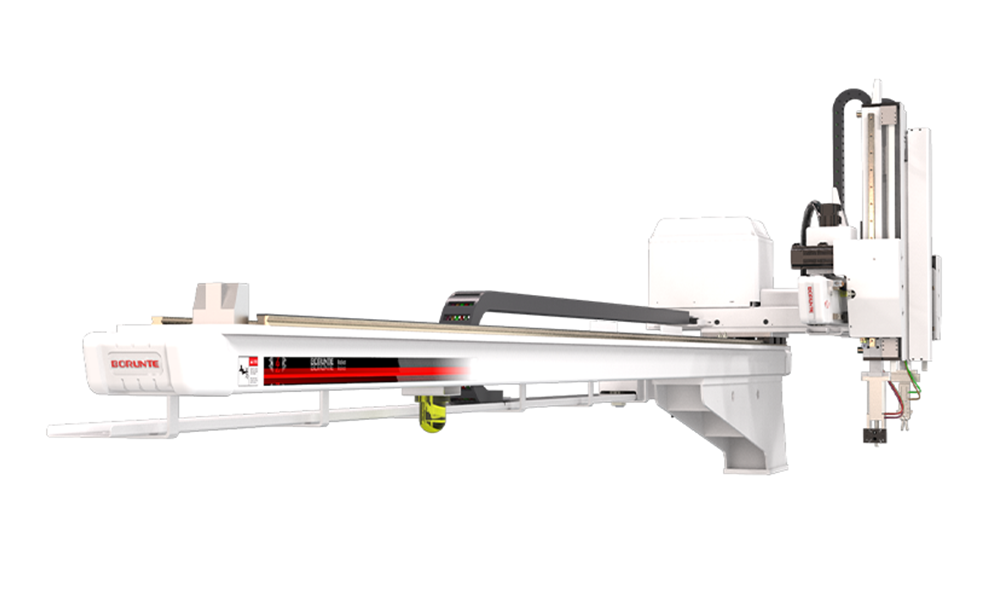


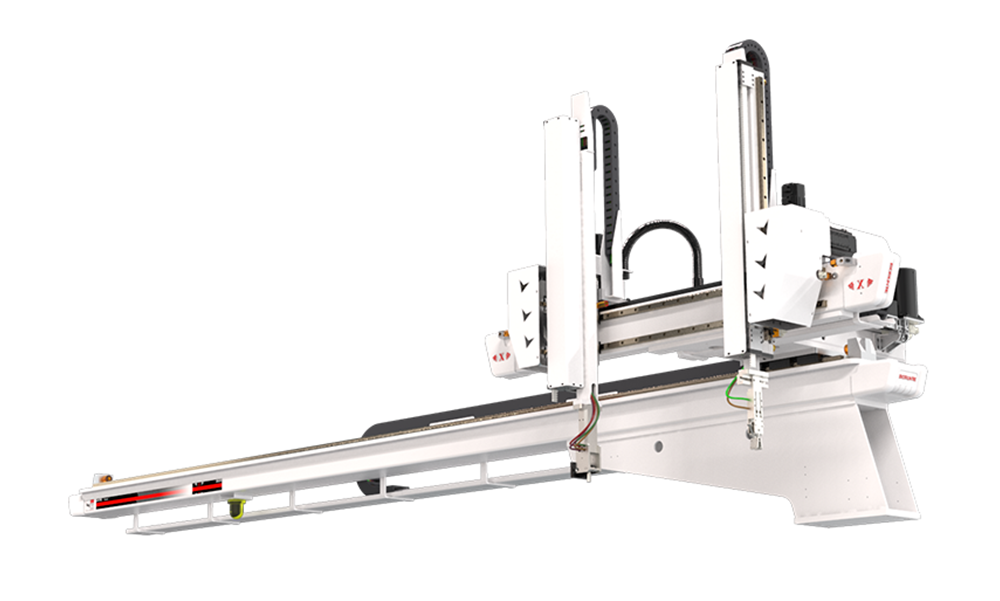
Rêzeya BRTVO9WDS5P0/F0 ji bo her cûre rêzikên makîneya derzîlêdanê ya horizontî ya 120T-320T ji bo hilber û sprue derbas dibe. Sazkirin ji robotên tîrêjê yên kevneşopî cûda ye, hilber li dawiya makîneyên şilkirina derzîlêdanê têne danîn. Destek wê ya ducar heye. Destê vertîkal qonaxek teleskopî ye û lêdana vertîkal 900 mm e. Servo ajokera AC-ê ya pênc-axîn. Piştî sazkirinê, cîhê sazkirinê ya ejector dikare ji hêla 30-40% ve were xilas kirin, û nebat dikare bi tevahî bêtir were bikar anîn ku destûrê dide karanîna çêtirîn cîhê hilberînê, hilberî dê 20-30% zêde bibe, rêjeya xeletiyê kêm bike, piştrast bike ewlehiya operatoran, hêza mirovî kêm bikin û hilberan bi rast kontrol bikin da ku çopê kêm bikin. Pergala yekbûyî ya ajokar û kontrolkerê pênc-texlî: kêm xetên sînyalê, pêwendiya dûr û dirêj, performansa berfirehkirina baş, şiyana dijî-destwerdana bihêz, rastbûna bilind a pozîsyona dubare, dikare bi hevdemî gelek eksê kontrol bike, lênihêrîna alavên hêsan, û rêjeya têkçûna kêm.

Positioning Accurate

Zû

Jiyana Xizmeta Dirêj

Rêjeya têkçûna kêm

Kar kêm bikin

Telecommunication
| Çavkaniya Hêzê (kVA) | IMM pêşniyar kirin (ton) | Traverse Driven | Modela EOAT |
| 3.40 | 120T-320T | AC Servo motor | du şuştin du sabît |
| Derbeya Traverse (mm) | Lêdana Xaçerê (mm) | Lêdana Vertîkal (mm) | Max.loading (kg) |
| Kemera asoyî ya bi dirêjahiya giştî ji 6 metreyan kêmtir e | Nexelas | 900 | 5 |
| Demjimêra Derxistina Hişk (çirk) | Demjimêra zuwa (çirk) | Xerca hewayê (NI/cycle) | Giran (kg) |
| 1.7 | nexelas | 9 | Ne-standard |
Nûnertiya modelê: W:Cûreya teleskopî. D: Destê hilber + milê bezê. S5: Pênc-texlî ku ji hêla AC Servo Motor ve tê ajotin (Traverse-texîn, Texne-Vertical + Xaçerê-xeber).
Dema çerxa jorîn encamên standarda testa navxweyî ya pargîdaniya me ne. Di pêvajoya serîlêdana rastîn a makîneyê de, ew ê li gorî operasyona rastîn cûda bibin.

| A | B | C | D | E | F | G | O |
| 1553.5 | ≤6m | 162 | nexelas | nexelas | nexelas | 174 | 445.5 |
| H | I | J | K | L | M | N | P |
| 187 | nexelas | nexelas | 255 | 555 | nexelas | 549 | nexelas |
| Q | |||||||
| 900 | |||||||
Ger taybetmendî û xuyang ji ber çêtirbûn û sedemên din were guheztin, bêtir agahdarî tune. Spas ji bo têgihîştina we.
Ev hilber ji bo 160T-320T hilberên qedandî yên makîneya şilkirina derzîlêdanê ya horizontal û derxistina avê maqûl e. Ew bi taybetî ji bo tiştên piçûk ên şilkirina derzîlêdanê yên wekî pêlîstokên plastîk, firçeyên diranan, qutiyên sabûnê, baran, keresteyên masê, amûr, pêlav û tiştên din ên plastîk ên rojane minasib e.
Bi tikandina bişkojka "TIME" ya li ser rûpela Rawestandin an Otoman dê we bibe rûpela Guhertina Demê.
Ji bo her gavê di rêzikê de bişkokên nîşankerê bikirtînin da ku dem biguhezînin. Dema ku hûn ketin dema nû, bişkojka Enter bikirtînin.
Demjimêra piştî pêngava çalakiyê wekî dema derengiya beriya çalakiyê tê binav kirin. Çalakiya heyî heya ku demjimêra dereng xilas bibe dê were kirin.
Ger veguheztina piştrastkirinê di qonaxa heyî ya rêzikê de tê bikar anîn. Heman dirêjiya demê dê ji bo çalakiyê were destnîşan kirin. Ger lêçûna dema çalakiyê ya rastîn ji tomarê derbas bibe, dibe ku çalakiya jêrîn were kirin heya ku guheztina çalakiyê piştî demjimêrê were verast kirin.

Bi rêkûpêk hişkbûna gwîz û kulman kontrol bikin:
Yek ji sedemên bingehîn ên têkçûna manîpulatorê rehetbûna gwîzan û pêlên ji ber dirêjahiya xebata dijwar e.
1.Gwîzên çîmentoyê yên tixûbê sinorê li beşa gerguhêz, beşa xêzkirinê, û milên pêş û kêlekê hişk bikin.
2. Tengbûna termînala pozîsyona xala relay di qutiya termînalê de di navbera beşê laşê tevger û qutiya kontrolê de kontrol bikin.
3. Ewlekirina her amûrek frenê.
4. Ma çîpên zeliqandî hene ku dibe sedema zirarê bide alavên din.

-

Injection Molding
Kategoriyên hilberan
-

Destê manîpulatorê şilkirina derzîlêdanê ya plastîk BRTV...
-

Robota derzîlêdanê ya şilkirina pîşesazî ya xeta BRTR0...
-

Manîpulatora bilez a bilind ji bo derziya qalibê BRTR0...
-

Manîpulatorê pîşesazî ya servo ya hêl BRTR09WD...
-

Manîpulatora servo ya derzîlêdanê ya AC BRTR13 ya pênc texlî...
-

Manîpulatorê Robotê Kartezî yê Lezgîn BRTR17WD...
BORUNTE û entegrator BORUNTE
Di ekosîstema BORUNTE de, BORUNTE berpirsiyarê R&D, hilberandin û firotina robot û manipulatoran e. Entegratorên BORUNTE pîşesaziyên xwe an avantajên zeviyê bikar tînin da ku sêwirana serîlêdana termînalê, yekbûn û karûbarê piştî firotanê ji bo hilberên BORUNTE ku ew difroşin peyda bikin. Entegratorên BORUNTE û BORUNTE berpirsiyariyên xwe yên têkildar pêk tînin û ji hev serbixwe ne, bi hev re dixebitin ku pêşeroja ronî ya BORUNTE pêşve bibin.
- Tel: + 86-400-870-8989
- NO.83, Rêya Shafu, Gundê Shabu, Bajarê Dalang, Bajarê Dongguan, parêzgeha Guangdong, Chinaîn
- borunterobotcoltd@gmail.com



Telafîkirina helwesta hêza Axial, Spîndala elektrîkê ya pneumatîk, sîstema dîtbarî 2D, Splitterê ne magnetîkî, Kûçikên spongê, Spindle pneumatîk herikbar pneumatîk,
-

vr
-

email
-

Telefon
-

Whatsapp
-

Kop