
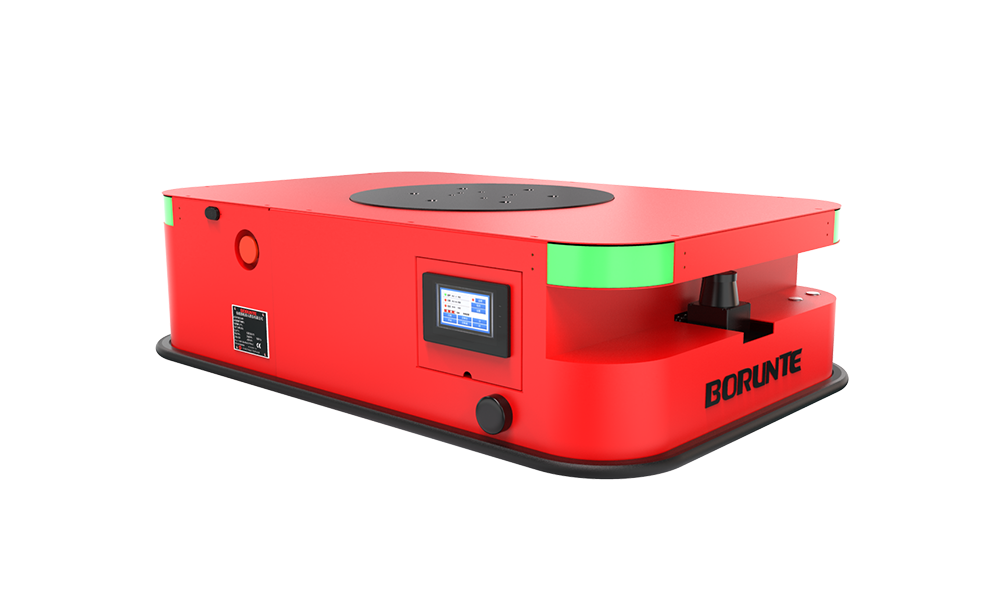



BRTAGV12010A robotek veguheztinê ya jack-up e ku lazer SLAM bi navîgasyon koda QR-ê bikar tîne, bi barek 100 kg. Navîgasyona Laser SLAM û koda QR-ê dikare bi serbestî were guheztin da ku gelek dîmen û hewcedariyên rastbûna cihêreng bicîh bîne. Di dîmenên tevlihev ên bi gelek refikan de, koda QR ji bo pozîsyona rast tê bikar anîn, ji bo pakkirin û hilgirtinê di nav refikan de vedikole. Navîgasyona Laser SLAM di dîmenên sabît de tê bikar anîn, ku ji hêla koda QR ya erdê ve ne sînorkirî ye û dikare bi serbestî bixebite.

Positioning Accurate

Zû

Jiyana Xizmeta Dirêj

Rêjeya têkçûna kêm

Kar kêm bikin

Telecommunication
| Moda navîgasyonê | Navîgasyon Laser SLAM & QR |
| Moda ajotinê | Du teker cudahiya |
| L*W*H | 996mm*646mm*269mm |
| Radyoya zivirandinê | 550mm |
| Pîvan | Nêzîkî 130 kg |
| Ratrd barkirin | 100 kg |
| Paqijkirina erdê | 32mm |
| Mezinahiya plakaya Jacking | R=200mm |
| Bilindahiya jackingê ya herî zêde | 60mm |
| Parametreyên Performansê | |
| Trafficability | ≤3% Slope |
| Rastbûna kinematic | ± 10 mm |
| Leza Cruise | 1 m/s (≤1,2 m/s) |
| Parametreyên Pîl | |
| Kapasîteya pîlê | 24A·H |
| Dema xebitandinê ya domdar | ≥8H |
| Rêbaza barkirinê | Manual, Auto |
| Amûrên taybetî | |
| Radar laser | ✓ |
|
|
|
| Bişkoka rawestandina acîl | ✓ |
| Gotevan | ✓ |
| Lampeya atmosferê | ✓ |
| Li dijî pevçûnê strip | ✓ |

Şeş taybetmendiyên BRTAGV12010A:
1. Xweser: Robotek rêberiya otomatîkî ya pêşkeftî bi senzor û pergalên navîgasyonê ve hatî çêkirin ku dihêle ew ji kontrola rasterast a mirovan serbixwe kar bike.
2. Zelalbûn: AGV dikare bi hêsanî rêyên normal bigere û her weha li gorî hewcedariyê veguhezîne rêyên din.
3. Karbidestî: AGV dikare lêçûnên veguhastinê kêm bike û di heman demê de rastbûna radestkirinê jî baştir bike.
4. Ewlehî: AGV bi amûrên parastinê yên ewlehiyê ve têne çêkirin ku pêşî li pevçûnan bigirin û ewlehiya mirovan û makîneyên din biparêzin.
5. Berhevkarî: AGV dikare were perwerde kirin da ku peywirên diyarkirî bi domdarî bike.
6. Battery-powered: AGV teknolojiya bataryayê ya dakêşbar bikar tîne, ku dihêle ew ji makîneyên kevneşopî ji bo demên dirêjtir bixebitin.
Parastina amûrê OF Robotê rêberê otomatîkî yê pêşkeftî:
1. Divê şêl û çerxa gerdûnî ya robotê rêberiya otomatîkî ya pêşkeftî mehê carekê were kontrol kirin, û lazer hefte carekê were kontrol kirin. Her sê mehan carekê, label û bişkokên ewlehiyê divê ceribandinek derbas bikin.
2. Ji ber ku çerxa ajotinê ya robot û çerxa gerdûnî polîuretan in, ew ê piştî karanîna dirêj li erdê şopan bihêlin, hewcedariya paqijkirina rûtîn hewce dike.
3. Divê laşê robot ji paqijkirina rûtîn derbas bibe.
4. Paqijkirina lazerê bi rêkûpêk pêdivî ye. Ger lazer bi rêkûpêk neyê domandin dibe ku robot nikaribe nîşanan an refên paletan nas bike; her weha dibe ku ew bêyî ravekirinek eşkere bigihîje rewşek rawestandina acîl.
5. AGV ya ku ji bo demeke dirêj ji xizmetê derketiye, divê bi tedbîrên dijî-korozyonê were hilanîn, bête girtin û mehê carekê pîlê were dagirtin.
6. Divê kêmkera gerstêrk a ferhengê ji bo lênihêrîna derzîlêdana neftê her şeş mehan carekê were lêkolîn kirin.
7. Ji bo bêtir agahdarî li ser lênêrîna amûran, bi rêberê bikarhênerê re şêwir bikin.



-

Parzûnkirina Warehouse
-
Barkirin û barkirin
-
Desthilatdariya otomatîkî




BORUNTE û entegrator BORUNTE
Di ekosîstema BORUNTE de, BORUNTE berpirsiyarê R&D, hilberandin û firotina robot û manipulatoran e. Entegratorên BORUNTE pîşesaziyên xwe an avantajên zeviyê bikar tînin da ku sêwirana serîlêdana termînalê, yekbûn û karûbarê piştî firotanê ji bo hilberên BORUNTE ku ew difroşin peyda bikin. Entegratorên BORUNTE û BORUNTE berpirsiyariyên xwe yên têkildar pêk tînin û ji hev serbixwe ne, bi hev re dixebitin ku pêşeroja ronî ya BORUNTE pêşve bibin.
- Tel: + 86-400-870-8989
- NO.83, Rêya Shafu, Gundê Shabu, Bajarê Dalang, Bajarê Dongguan, parêzgeha Guangdong, Chinaîn
- borunterobotcoltd@gmail.com



Kûçikên spongê, Spîndala elektrîkê ya pneumatîk, sîstema dîtbarî 2D, Spindle pneumatîk herikbar pneumatîk, Telafîkirina helwesta hêza Axial, Splitterê ne magnetîkî,
-

vr
-

email
-

Telefon
-

Whatsapp
-

Kop