



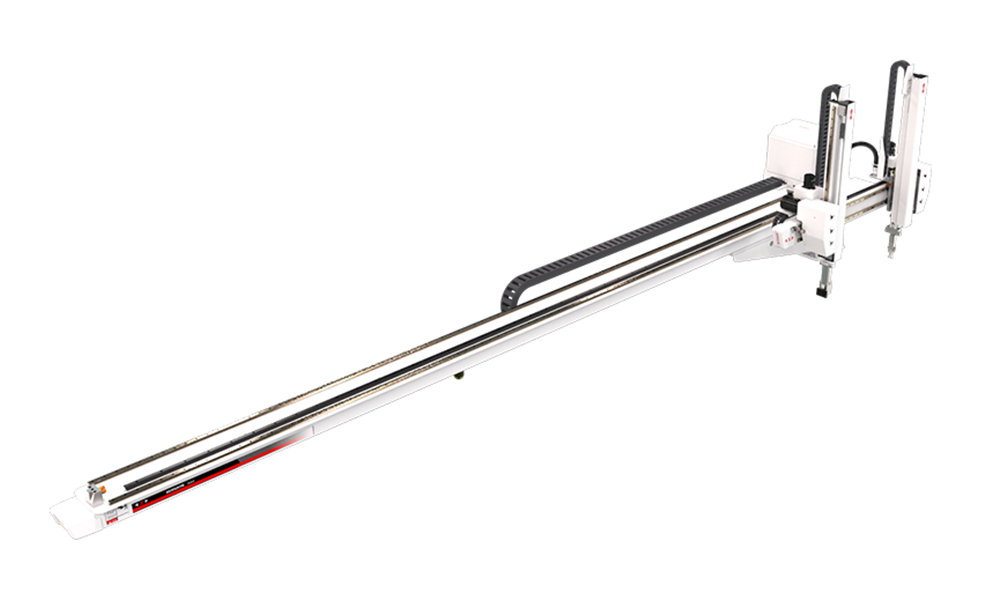
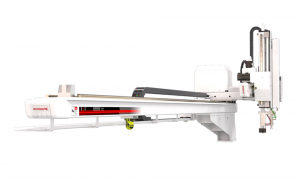
BRTV13WDS5P0/F0 სერია ვრცელდება ყველა ტიპის ჰორიზონტალური საინექციო მანქანების დიაპაზონზე 320T-700T გამოსატანი პროდუქტებისა და შპრიცისთვის. ინსტალაცია განსხვავდება ტრადიციული სხივური რობოტებისაგან, პროდუქტები მოთავსებულია საინექციო ჩამოსხმის მანქანების ბოლოს. მას აქვს ორმაგი მკლავი. ვერტიკალური მკლავი არის ტელესკოპური საფეხური და ვერტიკალური დარტყმა არის 1300 მმ. ხუთღერძიანი AC servo drive. ინსტალაციის შემდეგ, ეჟექტორის სამონტაჟო სივრცის დაზოგვა შესაძლებელია 30-40%-ით, ხოლო ქარხანა შეიძლება გამოყენებულ იქნას უფრო სრულად, რაც საშუალებას მისცემს საწარმოო სივრცის უკეთ ათვისებას, პროდუქტიულობა გაიზრდება 20-30%-ით, შეამცირებს დეფექტის სიჩქარეს, უზრუნველყოს ოპერატორების უსაფრთხოება, შეამციროს მუშახელი და ზუსტად აკონტროლოს გამომუშავება ნარჩენების შესამცირებლად. ხუთღერძიანი მძღოლისა და კონტროლერის ინტეგრირებული სისტემა: ნაკლები სიგნალის ხაზები, შორ მანძილზე კომუნიკაცია, გაფართოების კარგი შესრულება, ძლიერი ჩარევის საწინააღმდეგო უნარი, განმეორებითი პოზიციონირების მაღალი სიზუსტე, შეუძლია ერთდროულად აკონტროლოს მრავალი ღერძი, მარტივი აღჭურვილობის შენარჩუნება და ავარიის დაბალი მაჩვენებელი.

ზუსტი პოზიციონირება

სწრაფი

ხანგრძლივი მომსახურების ვადა

წარუმატებლობის დაბალი მაჩვენებელი

შრომის შემცირება

ტელეკომუნიკაცია
| ენერგიის წყარო (კვა) | რეკომენდებული IMM (ტონა) | ტრავერსი მამოძრავებელი | EOAT-ის მოდელი |
| 3.40 | 320T-700T | AC სერვო ძრავა | ორი შეწოვა ორი სამაგრი |
| ტრავერსის დარტყმა (მმ) | ჯვარედინი დარტყმა (მმ) | ვერტიკალური დარტყმა (მმ) | მაქსიმალური დატვირთვა (კგ) |
| ჰორიზონტალური თაღი საერთო სიგრძით 6 მეტრზე ნაკლები | მომლოდინე | 1300 წ | 8 |
| მშრალი ამოღების დრო (წმ) | მშრალი ციკლის დრო (წმ) | ჰაერის მოხმარება (NI/ციკლი) | წონა (კგ) |
| 2.3 | მომლოდინე | 9 | არასტანდარტული |
მოდელის წარმოდგენა: W: ტელესკოპური ტიპი. D: პროდუქტის მკლავი + სარბენი მკლავი. S5: ხუთღერძი, რომელსაც მართავს AC სერვო ძრავა (ტრავერსი-ღერძი, ვერტიკალური ღერძი+ ჯვარედინი ღერძი).
ზემოაღნიშნული ციკლის დრო არის ჩვენი კომპანიის შიდა ტესტის სტანდარტის შედეგები. მანქანის ფაქტობრივი გამოყენების პროცესში, ისინი განსხვავდებიან ფაქტობრივი მუშაობის მიხედვით.

| A | B | C | D | E | F | G | O |
| 1614 წ | ≤6მ | 162 | მომლოდინე | მომლოდინე | მომლოდინე | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | მომლოდინე | მომლოდინე | 253.5 | 399 | მომლოდინე | 549 | მომლოდინე |
| Q | |||||||
| 1300 წ | |||||||
დამატებითი გაფრთხილება არ არის, თუ სპეციფიკაცია და გარეგნობა შეიცვალა გაუმჯობესების და სხვა მიზეზების გამო. გმადლობთ გაგებისთვის.

1. მდგომარეობის შეცვლა
პლასტიკური საინექციო ჩამოსხმის მანიპულატორის მკლავის სასწავლო გულსაკიდი აქვს სამი სტატუსი: მექანიკური, გაჩერება და ავტო. [Manual]: ხელით რეჟიმში შესასვლელად, გადაიტანეთ მდგომარეობის გადამრთველი მარცხნივ. [Stop]: გაჩერების მდგომარეობაში შესასვლელად გადაიტანეთ მდგომარეობის გადამრთველი ცენტრში. პარამეტრების დაყენება შესაძლებელია ამ ეტაპზე. [Auto]: ავტომატურ მდგომარეობაში შესასვლელად, გადაიტანეთ მდგომარეობის გადამრთველი ცენტრში. ამ მდგომარეობაში შესაძლებელია ავტომატური და შესაბამისი პარამეტრების შესრულება.
2. ფუნქციის ღილაკები
[დაწყება] ღილაკი:
ფუნქცია 1: ავტომატურ რეჟიმში დააჭირეთ ღილაკს "დაწყება" მანიპულატორის ავტომატურად დასაწყებად.
ფუნქცია 2: გაჩერების მდგომარეობაში დააჭირეთ ღილაკს "Origin" და შემდეგ "Start" მანიპულატორის საწყის მდგომარეობაში დასაბრუნებლად.
ფუნქცია 3: გაჩერების მდგომარეობაში დააჭირეთ ღილაკს "HP" და შემდეგ "Start" მანიპულატორის საწყისის გადატვირთვისთვის.
[Stop] ღილაკი:
ფუნქცია 1: ავტომატურ რეჟიმში დააჭირეთ ღილაკს "Stop" და აპლიკაცია შეჩერდება, როდესაც მოდული დასრულდება. ფუნქცია 2: როდესაც გაფრთხილება ხდება, შეეხეთ „Stop“-ს ავტომატურ რეჟიმში, რათა წაშალოთ გადაჭრილი განგაშის ჩვენება.
[Origin] ღილაკი: ის გამოიყენება მხოლოდ სახლის მოქმედებებზე. გთხოვთ, იხილოთ ნაწილი 2.2.4 "სახლის მეთოდი".
[HP] ღილაკი: დააჭირეთ "HP" და შემდეგ "Start, ყველა ღერძი გადაიტვირთება Y1, Y2 Z, X1 და X2 თანმიმდევრობით, Y1 და Y2 დაბრუნდება 0-ზე და Z, X1 და X2 დაბრუნდება საწყისზე. პროგრამის პოზიცია.
ღილაკი [Speed Up/Down]: ეს ორი ღილაკი შეიძლება გამოყენებულ იქნას გლობალური სიჩქარის დასარეგულირებლად ხელით და ავტომატურ მდგომარეობაში.
ღილაკი [Emergency Stop]: გადაუდებელ შემთხვევაში, ღილაკზე "Emergency Stop" დაჭერით გამოირთვება ყველა ღერძი და გაჟღერდება "Emergency Stop" გაფრთხილება. ღილაკის ამოღების შემდეგ დააჭირეთ "Stop" ღილაკს განგაშის გასაჩუმებლად.

-

საინექციო ჩამოსხმა
პროდუქტების კატეგორიები
-
ხუთღერძიანი მაღალი სიზუსტის სერვო მანიპულატორი BRTV0...
-

ხაზოვანი სამრეწველო ჩამოსხმის საინექციო რობოტი BRTR0...
-

მაღალსიჩქარიანი მანიპულატორი ყალიბის ინექციისთვის BRTR0...
-

AC სერვო ხაზოვანი სამრეწველო მანიპულატორი BRTR09WD...
-

ხუთღერძიანი AC სერვო ინექციის მანიპულატორი BRTR13...
-

სწრაფი სიჩქარის კარტეზიული რობოტი მანიპულატორი BRTR17WD...
BORUNTE და BORUNTE ინტეგრატორები
BORUNTE-ის ეკოსისტემაში BORUNTE პასუხისმგებელია რობოტებისა და მანიპულატორების R&D-ზე, წარმოებასა და გაყიდვებზე. BORUNTE ინტეგრატორები იყენებენ თავიანთ ინდუსტრიაში ან დარგში არსებულ უპირატესობებს, რათა უზრუნველყონ ტერმინალის აპლიკაციის დიზაინი, ინტეგრაცია და გაყიდვების შემდგომი მომსახურება BORUNTE-ის პროდუქტებისთვის, რომლებსაც ისინი ყიდიან. BORUNTE და BORUNTE ინტეგრატორები ასრულებენ თავიანთ პასუხისმგებლობებს და ერთმანეთისგან დამოუკიდებლები არიან და ერთად მუშაობენ BORUNTE-ის ნათელი მომავლის ხელშეწყობისთვის.
- ტელ:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, ჩინეთი
- borunterobotcoltd@gmail.com



ღრუბლის შეწოვის ჭიქები, 2D ვიზუალური სისტემა, ღერძული ძალის პოზიციის კომპენსატორი, პნევმატური მცურავი პნევმატური შპინდლი, პნევმატური მცურავი ელექტრო spindle, არამაგნიტური გამყოფი,
-

vr
-

ელ
-

ტელეფონი
-

Whatsapp
-

ზედა