



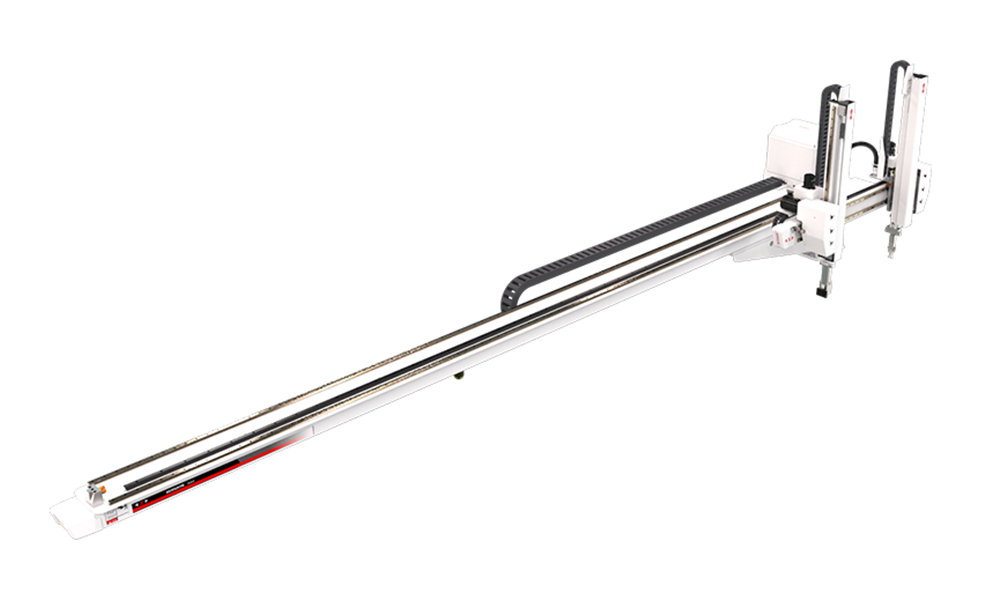
La serie BRTV13WDS5P0/F0 si applica a tutti i tipi di gamme di macchine a iniezione orizzontali da 320T a 700T per prodotti da asporto e materozze. L'installazione è diversa dai tradizionali robot a trave, i prodotti vengono posizionati all'estremità delle macchine per lo stampaggio a iniezione. Ha un doppio braccio. Il braccio verticale è un tavolino telescopico e la corsa verticale è di 1300mm. Servoazionamento CA a cinque assi. Dopo l'installazione, lo spazio di installazione dell'eiettore può essere risparmiato del 30-40% e l'impianto può essere utilizzato in modo più completo consentendo un migliore utilizzo dello spazio di produzione, la produttività sarà aumentata del 20-30%, si ridurrà il tasso di difetti, si garantirà la sicurezza degli operatori, ridurre la manodopera e controllare accuratamente la produzione per ridurre gli sprechi. Sistema integrato di driver e controller a cinque assi: meno linee di segnale, comunicazione a lunga distanza, buone prestazioni di espansione, forte capacità anti-interferenza, elevata precisione di posizionamento ripetuto, può controllare simultaneamente più assi, semplice manutenzione delle apparecchiature e basso tasso di guasto.

Posizionamento accurato

Veloce

Lunga durata

Basso tasso di fallimento

Ridurre la manodopera

Telecomunicazione
| Fonte di alimentazione (kVA) | IMM consigliato (tonnellate) | Traversa guidata | Modello di EOAT |
| 3,40 | 320T-700T | Servomotore CA | due aspirazioni due apparecchi |
| Corsa trasversale (mm) | Corsa trasversale (mm) | Corsa verticale (mm) | Carico massimo (kg) |
| Arco orizzontale con lunghezza totale inferiore a 6 metri | in attesa di | 1300 | 8 |
| Tempo di asciugatura (sec) | Tempo del ciclo di asciugatura (sec) | Consumo d'aria (NI/ciclo) | Peso (kg) |
| 2.3 | in attesa di | 9 | Non standard |
Rappresentazione del modello: W: tipo telescopico. D: Braccio del prodotto + braccio del corridore. S5: cinque assi azionati da servomotore CA (asse trasversale, asse verticale + asse trasversale).
I tempi di ciclo sopra menzionati sono il risultato degli standard di test interni della nostra azienda. Nell'effettivo processo di applicazione della macchina, varieranno in base all'operazione effettiva.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | in attesa di | in attesa di | in attesa di | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | in attesa di | in attesa di | 253,5 | 399 | in attesa di | 549 | in attesa di |
| Q | |||||||
| 1300 | |||||||
Nessun ulteriore avviso se le specifiche e l'aspetto vengono modificati a causa di miglioramenti o per altri motivi. Grazie per la comprensione.

1. Interruttore di stato
Il pendente di insegnamento del braccio manipolatore per stampaggio a iniezione di plastica ha tre stati: Manuale, Arresto e Automatico. [Manuale]: per accedere alla modalità manuale, spostare l'interruttore di stato a sinistra. [Stop]: per accedere allo stato Stop, spostare l'interruttore di stato al centro. In questa fase è possibile impostare i parametri. [Auto]: per accedere allo stato Auto, spostare l'interruttore di stato al centro. In questa condizione è possibile eseguire le impostazioni automatiche e corrispondenti.
2. Pulsanti funzione
Pulsante [Avvia]:
Funzione 1: In modalità Auto, premere "Start" per avviare automaticamente il manipolatore.
Funzione 2: Nello stato Stop, premere "Origine" e poi "Avvia" per ripristinare il manipolatore all'origine.
Funzione 3: Nello stato Stop, premere "HP" e poi "Start" per ripristinare l'origine del manipolatore.
Pulsante [Interrompi]:
Funzione 1: In modalità Auto, premere "Stop" e l'applicazione si fermerà una volta terminato il modulo. Funzione 2: Quando si verifica un avviso, toccare "Stop" in modalità Auto per cancellare la visualizzazione dell'allarme risolto.
Pulsante [Origine]: applicabile solo alle azioni di homing. Fare riferimento alla sezione 2.2.4 "Metodo di homing".
Pulsante [HP]: premere "HP" e poi "Start, tutti gli assi verranno reimpostati nell'ordine Y1, Y2 Z, X1 e X2, Y1 e Y2 torneranno a 0 e Z, X1 e X2 torneranno all'inizio posizione del programma.
Pulsante [Velocità su/giù]: questi due pulsanti possono essere utilizzati per regolare la velocità globale negli stati Manuale e Automatico.
Pulsante [Arresto di emergenza]: in caso di emergenza, premendo il pulsante "Arresto di emergenza" si spegneranno tutti gli assi e verrà emesso l'avviso "Arresto di emergenza". Dopo aver rimosso la manopola, premere il tasto "Stop" per silenziare l'allarme.

-

Stampaggio ad iniezione
Categorie di prodotti
-
Servomanipolatore a cinque assi ad alta precisione BRTV0...
-

Robot ad iniezione per stampaggio industriale lineare BRTR0...
-

Manipolatore ad alta velocità per iniezione stampi BRTR0...
-

Manipolatore industriale lineare AC servo BRTR09WD...
-

Manipolatore servoiniezione AC a cinque assi BRTR13...
-

Manipolatore robot cartesiano ad alta velocità BRTR17WD...
BORUNTE e integratori BORUNTE
Nell'ecosistema BORUNTE, BORUNTE è responsabile della ricerca e sviluppo, della produzione e della vendita di robot e manipolatori. Gli integratori BORUNTE sfruttano i loro vantaggi nel settore o sul campo per fornire progettazione di applicazioni terminali, integrazione e servizio post-vendita per i prodotti BORUNTE che vendono. BORUNTE e gli integratori di BORUNTE adempiono alle rispettive responsabilità e sono indipendenti l'uno dall'altro, lavorando insieme per promuovere il brillante futuro di BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, villaggio Shabu, città di Dalang, città di Dongguan, provincia del Guangdong, Cina
- borunterobotcoltd@gmail.com



Ventose in spugna, Sistema visivo 2D, Compensatore di posizione della forza assiale, Mandrino pneumatico flottante, Elettromandrino flottante pneumatico, Divisore non magnetico,
-

vr
-

e-mail
-

Telefono
-

Whatsapp
-

Superiore