




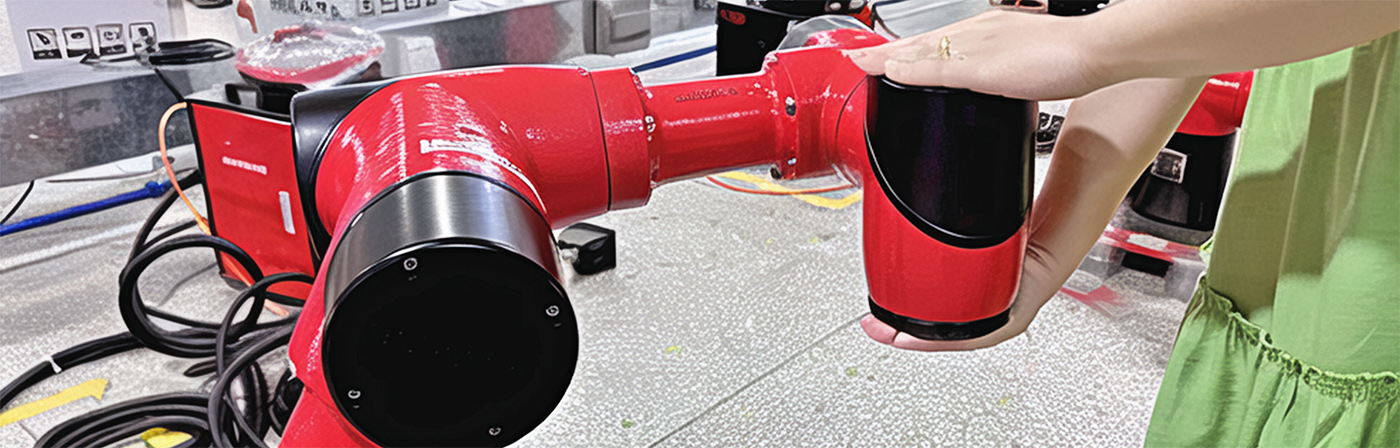
BRTIRXZ0805A è un robot cooperativo a sei assi con funzione di insegnamento del trascinamento sviluppato in modo indipendente da BORUNTE. con un carico massimo di 5 kg e una lunghezza massima del braccio di 930 mm. Ha le funzioni di rilevamento delle collisioni e riproduzione delle tracce. È sicuro ed efficiente, intelligente e facile da usare, flessibile e leggero, economico e affidabile, basso consumo energetico e altre caratteristiche, che soddisfano ampiamente le esigenze della cooperazione uomo-macchina. La sua elevata sensibilità e risposta rapida possono essere applicate a linee di produzione flessibili ad alta densità, per soddisfare le esigenze di imballaggio del prodotto, stampaggio a iniezione, carico e scarico, assemblaggio e altre operazioni, in particolare per la richiesta di applicazioni di lavoro collaborativo uomo-macchina. Il grado di protezione raggiunge IP50. A prova di polvere e impermeabile. La precisione del posizionamento ripetuto è ±0,1 mm.

Posizionamento accurato

Veloce

Lunga durata

Basso tasso di fallimento

Ridurre la manodopera

Telecomunicazione
| Articolo | Allineare | Velocità massima | ||
| Braccio | J1 | ±180° | 180°/s | |
| J2 | ±90° | 180°/s | ||
| J3 | -70°~+240° | 180°/s | ||
| Polso | J4 | ±180° | 180°/s | |
| J5 | ±180° | 180°/s | ||
| J6 | ±360° | 180°/s | ||
|
| ||||
| Lunghezza del braccio (mm) | Capacità di carico (kg) | Precisione di posizionamento ripetuto (mm) | Fonte di alimentazione (kVA) | Peso (kg) |
| 930 | 5 | ±0,05 | 0,76 | 28 |

Caratteristiche di BRTIRXZ0805A
1. Collaborazione uomo-macchina più sicura: il sensore di coppia integrato ad alta affidabilità con funzione di rilevamento delle collisioni può garantire in modo efficiente la sicurezza della collaborazione uomo-macchina, senza la necessità di isolamento della recinzione, risparmiando notevolmente spazio.
2. Facile controllo e insegnamento del trascinamento: la programmazione può essere ottenuta trascinando la traiettoria o utilizzando la registrazione sensibile alla vista 3D della traiettoria target, che è semplice e facile da usare;
3. Struttura leggera, portatile e semplice: progettato con una struttura leggera, l'intero robot pesa meno di 35 kg ed è dotato di un modulo altamente integrato, che semplifica notevolmente la struttura interna del corpo e facilita lo smontaggio e il montaggio.
4. Economico ed efficiente: bellissimo design del robot e basso costo. Presenta un investimento iniziale basso, un elevato rapporto costo-efficacia, movimenti flessibili e fluidi e una velocità massima di 2,0 m/s.
5. Funzionalità di sicurezza: funzionalità di sicurezza avanzate, come il rilevamento delle collisioni e il monitoraggio della forza, sono spesso integrate in questi robot, garantendo un funzionamento sicuro in prossimità dei lavoratori umani. Ciò li rende adatti per applicazioni di robot collaborativi (cobot), in cui esseri umani e robot lavorano insieme.
Condizioni di lavoro di BRTIRXZ0805A
1, Alimentazione: armadio di controllo CA: 220 V ± 10% 50 HZ/60 HZ, corpo CC: 48 V ± 10%
2、Temperatura operativa: 0℃-45℃; Temperatura di battitura:15℃-25℃
3、Umidità relativa:20-80%RH (senza condensa)
4、Rumore: ≤75dB(A)



-
Collaborazione uomo-macchina
-

Stampaggio ad iniezione
-

trasporto
-
assemblaggio





BORUNTE e integratori BORUNTE
Nell'ecosistema BORUNTE, BORUNTE è responsabile della ricerca e sviluppo, della produzione e della vendita di robot e manipolatori. Gli integratori BORUNTE sfruttano i loro vantaggi nel settore o sul campo per fornire progettazione di applicazioni terminali, integrazione e servizio post-vendita per i prodotti BORUNTE che vendono. BORUNTE e gli integratori di BORUNTE adempiono alle rispettive responsabilità e sono indipendenti l'uno dall'altro, lavorando insieme per promuovere il brillante futuro di BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, villaggio Shabu, città di Dalang, città di Dongguan, provincia del Guangdong, Cina
- borunterobotcoltd@gmail.com



Mandrino pneumatico flottante, Sistema visivo 2D, Divisore non magnetico, Ventose in spugna, Compensatore di posizione della forza assiale, Elettromandrino flottante pneumatico,
-

vr
-

e-mail
-

Telefono
-

Whatsapp
-

Superiore