


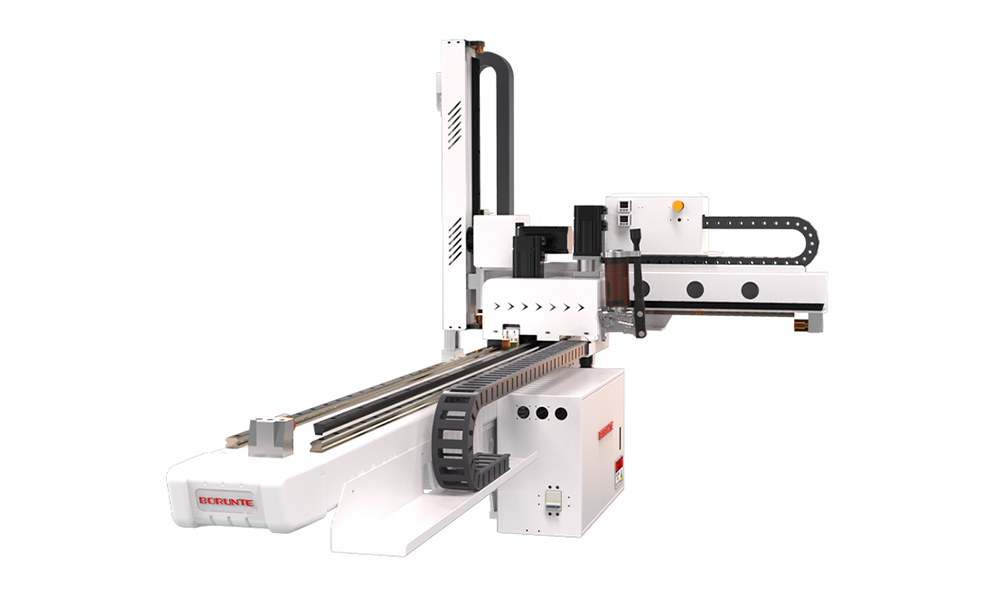

BRTNG09WSS3P/F շարքը կիրառվում է 160T-380T հորիզոնական ներարկման մեքենաների բոլոր տեսակների համար՝ հանվող ապրանքների համար: Ուղղահայաց թեւը հեռադիտակային տեսակն է արտադրանքի թեւով: Երեք առանցք AC servo drive-ը խնայում է ժամանակը, քան նմանատիպ մոդելները, ճշգրիտ դիրքավորումը և կարճ ձևավորման ցիկլը: Մանիպուլյատորը տեղադրելուց հետո արտադրողականությունը կբարձրանա 10-30%-ով և կնվազեցնի արտադրանքի թերի մակարդակը, կապահովի օպերատորների անվտանգությունը, կկրճատի աշխատուժը և ճշգրիտ կվերահսկի արտադրանքը թափոնները նվազեցնելու համար: Երեք առանցք ունեցող վարորդի և կարգավորիչի ինտեգրված համակարգ. ավելի քիչ ազդանշանային գծեր, միջքաղաքային հաղորդակցություն, լավ ընդլայնման կատարում, ուժեղ հակամիջամտության ունակություն, կրկնվող դիրքավորման բարձր ճշգրտություն, կարող է միաժամանակ կառավարել բազմաթիվ առանցքների պարզ սարքավորումների սպասարկում և խափանումների ցածր մակարդակ:

Ճշգրիտ դիրքավորում

Արագ

Երկար ծառայության ժամկետ

Անհաջողության ցածր մակարդակ

Կրճատել աշխատուժը

Հեռահաղորդակցություն
| Էլեկտրաէներգիայի աղբյուր (կՎԱ) | Առաջարկվող IMM (տոննա) | Traverse Driven | EOAT-ի մոդելը |
| 3.23 | 160T-380T | AC Servo շարժիչ | երկու suctions երկու հարմարանքներ |
| Թրավերս հարված (մմ) | Խաչաձև հարված (մմ) | Ուղղահայաց հարված (մմ) | Առավելագույն ծանրաբեռնվածություն (կգ) |
| 1500 թ | 600 թ | 950 թ | 2 |
| Չոր հանելու ժամանակը (վրկ) | Չոր ցիկլի ժամանակը (վրկ) | Օդի սպառում (NI/ցիկլ) | Քաշը (կգ) |
| 0,68 | 4.07 | 3.2 | 300 |
Մոդելի ներկայացում. W: Հեռադիտակային բեմ: S: Արտադրանքի թեւ S3. երեք առանցքով շարժվող AC Servo Motor-ով (ուղղահայաց առանցք + խաչաձև առանցք)
Վերոհիշյալ ցիկլի ժամանակը մեր ընկերության ներքին փորձարկման ստանդարտի արդյունքներն են: Մեքենայի իրական կիրառման գործընթացում դրանք կտարբերվեն ըստ իրական գործողության:

| A | B | C | D | E | F | G |
| 1362 թ | 2275,5 | 950 թ | 298 | 1500 թ | / | 219 |
| H | I | J | K | L | M | N |
| / | / | 916 թ | / | 234.5 | 237.5 | 600 թ |
Ոչ մի լրացուցիչ ծանուցում, եթե ճշգրտումը և տեսքը փոխվել են բարելավման և այլ պատճառներով: Շնորհակալություն ըմբռնման համար։
BRTNG09WSS3PF-ի կարևոր առանձնահատկությունները.
1. Արտադրանքը հեշտ է հեռացնել առջևի և հետևի սերվոյի շնորհիվ, իսկ առջևի և հետևի շարժման հեռավորությունը զգալի է.
2. Սերվո շարժիչը, որն ունի արագ շարժման արագություն և ճշգրիտ տեղադրում, սնուցում է սերվո մեքենան:
3. Էլեկտրական հարմարեցման հնարավորություններ, պարզ օգտագործման համար;
4. Կրկնակի արագության մեխանիզմի կիրառում, որի պատճառով թեւն ավելի արագ է շարժվում; Մեքենայի ցածր բարձրությունը թույլ է տալիս տեղադրումը ցածր գործարանային կառույցներում.
5. Թևը կազմված է ճշգրիտ գծային լոգարիթմական բլոկներից և բարձր ամրության ալյումինե պրոֆիլներից; նվազագույն շփում, լավ կոշտություն և երկար սպասարկման ժամկետ;
6. Կեցվածքի համակցված ձևավորում 90 աստիճանի ֆիքսված պտույտով, որը կարող է օգտագործվել ֆիքսված կամ շարժական կաղապարներով ապրանքներ ստանալու համար;
7. Կրկնակի թևի կառուցվածքը թույլ է տալիս միաժամանակ գտնել արտադրանքները և ջրի ելքերը և կարող է օգտագործվել նաև ցանկացած թևի հետ ինքնուրույն:
8. Ձուլման ցիկլը նվազեցնելու համար մեքենան օգտագործում է կաղապարի ներսում արագ վեր ու վար հավաքելու մեխանիզմ և արտադրանքի և վարդակների աստիճանական տեղադրում կաղապարից դուրս, ինչը հանգեցնում է ավելի կայուն աշխատանքի և ավելի անվտանգ շարժման:
Մանիպուլյատորի յուրաքանչյուր մասի հատուկ ստուգման գործողություն.
1. Կրկնակի կետային համակցության պահպանում
Ա. Ստուգեք ջրի կամ յուղի ջրի գավաթը և որքան հնարավոր է շուտ դատարկեք այն:
B. Ստուգեք, որ կրկնակի էլեկտրական համակցված ճնշման ցուցիչը գործում է:
C. Օդային կոմպրեսորի դրենաժային ժամանակացույցը
2. Քննեք պտուտակներ և ֆյուզելաժի ամրացնող պտուտակները:
Ա. Ստուգեք ամրագոտիների միացման բլոկը և ֆյուզելաժի պտուտակները՝ թեթև ամրացնող պտուտակների համար:
B. Ստուգեք՝ տեսնելու համար, թե արդյոք ամրացվող մխոցի ամրացնող պտուտակները արձակված են:
C. Ստուգեք՝ տեսնելու համար, թե արդյոք պտուտակը, որը միացնում է սարքը ֆյուզելյաժին, թուլացած է:
3. Ուսումնասիրեք համաժամացման գոտին
Ա. Ուսումնասիրեք սինխրոն գոտու մակերեսը և ատամների ձևը՝ տեսնելու, թե արդյոք դրանք մաշված են:
B. Որոշեք, թե արդյոք գոտին ազատ է օգտագործման ընթացքում: Թուլացած գոտին պետք է նորից լարել՝ օգտագործելով ձգող սարք:

-

Ներարկման համաձուլվածքներ
Ապրանքների կատեգորիաներ
-

Երեք առանցք պլաստիկ ներարկման ռոբոտի մանիպուլյատոր...
-

Հինգ առանցք երկարությամբ ուղղահայաց հարվածով մանիպուլյատորի ձեռքը ...
-

Հինգ առանցքով խոշոր ներարկման ձուլման մանիպուլյատոր BR...
-

Մանիպուլյատորի թեւը, որը վարում է AC servo շարժիչով BRTN30...
-

AC servo molding injection manipulator BRTNN11W...
-

Չորս առանցքներով սերվո շարժիչով ներարկման մանիպուլյատոր BR...
BORUNTE և BORUNTE ինտեգրատորներ
BORUNTE էկոհամակարգում BORUNTE-ն պատասխանատու է ռոբոտների և մանիպուլյատորների հետազոտության և զարգացման, արտադրության և վաճառքի համար: BORUNTE ինտեգրատորներն օգտագործում են իրենց արդյունաբերության կամ դաշտի առավելությունները՝ իրենց կողմից վաճառվող BORUNTE արտադրանքների համար տերմինալային հավելվածների ձևավորում, ինտեգրում և վաճառքից հետո սպասարկում ապահովելու համար: BORUNTE և BORUNTE ինտեգրատորները կատարում են իրենց համապատասխան պարտականությունները և միմյանցից անկախ են՝ միասին աշխատելով BORUNTE-ի պայծառ ապագան խթանելու համար:
- Հեռ.+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Չինաստան
- borunterobotcoltd@gmail.com



Առանցքային ուժի դիրքի փոխհատուցիչ, Օդաճնշական լողացող օդաճնշական spindle, Օդաճնշական լողացող էլեկտրական spindle, Սպունգային ներծծող բաժակներ, 2D տեսողական համակարգ, Ոչ մագնիսական բաժանարար,
-

vr
-

էլ
-

Հեռախոս
-

Whatsapp
-

Վերև