



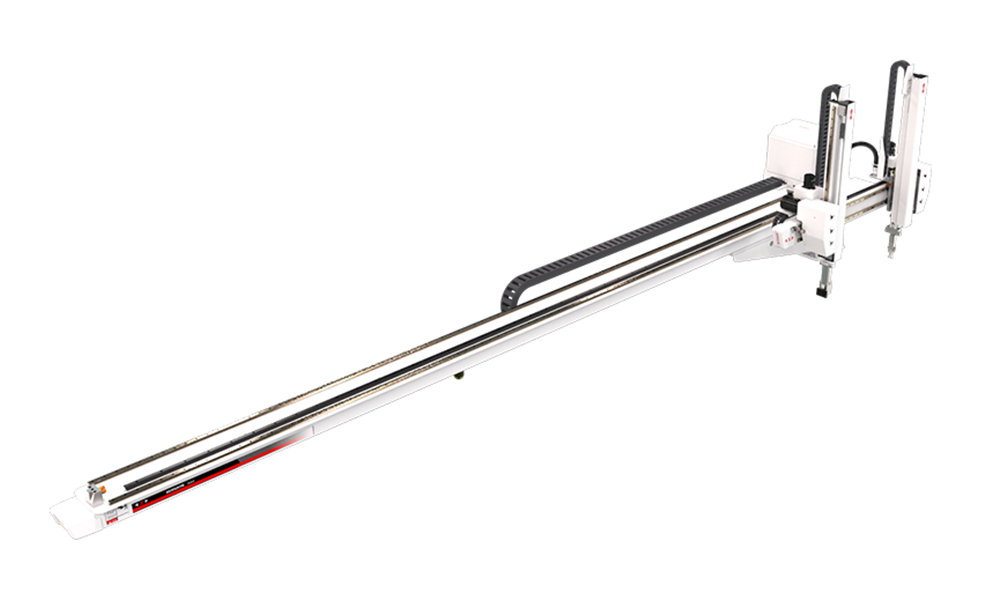
BRTV13WDS5P0/F0 շարքը կիրառվում է 320T-700T 320T-700T հորիզոնական ներարկման մեքենաների բոլոր տեսակների համար՝ հանելու արտադրանքի և սրվակի համար: Տեղադրումը տարբերվում է ավանդական ճառագայթային ռոբոտներից, արտադրանքները տեղադրվում են ներարկման ձուլման մեքենաների վերջում: Ունի կրկնակի թեւ։ Ուղղահայաց թեւը հեռադիտակային փուլ է, իսկ ուղղահայաց հարվածը 1300 մմ է: Հինգ առանցք AC servo drive. Տեղադրվելուց հետո էժեկտորի տեղադրման տարածքը կարող է խնայվել 30-40%-ով, և կայանը կարող է օգտագործվել ավելի լիարժեք՝ թույլ տալով ավելի լավ օգտագործել արտադրական տարածքը, արտադրողականությունը կավելանա 20-30%-ով, նվազեցնել թերության մակարդակը, ապահովել օպերատորների անվտանգությունը, նվազեցնել աշխատուժը և ճշգրիտ վերահսկել արտադրանքը` թափոնները նվազեցնելու համար: Հինգ առանցք ունեցող վարորդի և վերահսկիչի ինտեգրված համակարգ. ավելի քիչ ազդանշանային գծեր, միջքաղաքային հաղորդակցություն, լավ ընդլայնման կատարում, ուժեղ հակամիջամտության ունակություն, կրկնվող դիրքավորման բարձր ճշգրտություն, կարող է միաժամանակ կառավարել բազմաթիվ առանցքներ, սարքավորումների պարզ սպասարկում և խափանումների ցածր մակարդակ:

Ճշգրիտ դիրքավորում

Արագ

Երկար ծառայության ժամկետ

Անհաջողության ցածր մակարդակ

Կրճատել աշխատուժը

Հեռահաղորդակցություն
| Էլեկտրաէներգիայի աղբյուր (կՎԱ) | Առաջարկվող IMM (տոննա) | Traverse Driven | EOAT-ի մոդելը |
| 3.40 | 320T-700T | AC Servo շարժիչ | երկու suctions երկու հարմարանքներ |
| Թրավերս հարված (մմ) | Խաչաձև հարված (մմ) | Ուղղահայաց հարված (մմ) | Առավելագույն ծանրաբեռնվածություն (կգ) |
| Հորիզոնական կամար, որի ընդհանուր երկարությունը 6 մետրից պակաս է | սպասվում է | 1300 թ | 8 |
| Չոր հանելու ժամանակը (վրկ) | Չոր ցիկլի ժամանակը (վրկ) | Օդի սպառում (NI/ցիկլ) | Քաշը (կգ) |
| 2.3 | սպասվում է | 9 | Ոչ ստանդարտ |
Մոդելի ներկայացում. W: Հեռադիտակային տեսակ: D: Ապրանքի թեւ + վազող թեւ: S5. Հինգ առանցք, որը շարժվում է AC Servo Motor-ով (Traverse-axis, Vertical-axis+ Crosswise-axis):
Վերոհիշյալ ցիկլի ժամանակը մեր ընկերության ներքին փորձարկման ստանդարտի արդյունքներն են: Մեքենայի իրական կիրառման գործընթացում դրանք կտարբերվեն ըստ իրական գործողության:

| A | B | C | D | E | F | G | O |
| 1614 թ | ≤6 մ | 162 | սպասվում է | սպասվում է | սպասվում է | 167.5 | 481 թ |
| H | I | J | K | L | M | N | P |
| 191 թ | սպասվում է | սպասվում է | 253.5 | 399 թ | սպասվում է | 549 թ | սպասվում է |
| Q | |||||||
| 1300 թ | |||||||
Ոչ մի լրացուցիչ ծանուցում, եթե ճշգրտումը և տեսքը փոխվել են բարելավման և այլ պատճառներով: Շնորհակալություն ըմբռնման համար։

1. Պետական անջատիչ
Պլաստիկ ներարկման մանիպուլյատորի ուսուցողական կախազարդն ունի երեք կարգավիճակ՝ ձեռքով, կանգառ և ավտոմատ: [Ձեռնարկ]. Ձեռքով ռեժիմ մտնելու համար վիճակի անջատիչը տեղափոխեք ձախ: [Stop]. Stop վիճակ մուտք գործելու համար վիճակի անջատիչը տեղափոխեք կենտրոն: Պարամետրերը կարող են սահմանվել այս փուլում: [Auto]. Ավտոմատ վիճակ մտնելու համար վիճակի անջատիչը տեղափոխեք կենտրոն: Այս վիճակում կարող են կատարվել ավտոմատ և համապատասխան կարգավորումներ:
2. Ֆունկցիոնալ կոճակներ
[Սկսել] կոճակ:
Գործառույթ 1. Ավտոմատ ռեժիմում սեղմեք «Սկսել»՝ մանիպուլյատորն ինքնաբերաբար գործարկելու համար:
Գործառույթ 2. Stop վիճակում սեղմեք «Origin» և ապա «Start»՝ մանիպուլյատորը սկզբնաղբյուրը վերականգնելու համար:
Գործառույթ 3. Stop վիճակում սեղմեք «HP» և ապա «Start»՝ մանիպուլյատորի ծագումը վերականգնելու համար:
[Stop] կոճակը.
Գործառույթ 1. Ավտոմատ ռեժիմում սեղմեք «Stop» և հավելվածը կդադարի, երբ մոդուլն ավարտվի: Գործառույթ 2. Երբ ահազանգ է լինում, ավտոմատ ռեժիմում հպեք «Կանգնեցնել»՝ լուծված տագնապի էկրանը ջնջելու համար:
[Origin] կոճակ. այն կիրառելի է միայն տան գործողությունների համար: Խնդրում ենք ծանոթանալ Բաժին 2.2.4 «Տունավորման մեթոդը»:
[HP] կոճակ. սեղմեք «HP» և այնուհետև «Սկսել, բոլոր առանցքները կվերակայվեն Y1, Y2 Z, X1 և X2 հերթականությամբ, Y1 և Y2 կվերադառնան 0, իսկ Z, X1 և X2 կվերադառնան սկզբին: ծրագրի դիրքորոշումը։
[Speed Up/Down] կոճակ. այս երկու կոճակները կարող են օգտագործվել ձեռքով և ավտոմատ վիճակում գլոբալ արագությունը կարգավորելու համար:
[Emergency Stop] կոճակ. Արտակարգ իրավիճակների դեպքում, սեղմելով «Emergency Stop» կոճակը, բոլոր առանցքները կանջատվեն և կհնչի «Արտակարգ կանգառ» ահազանգը: Կոճակը հանելուց հետո սեղմեք «Stop» ստեղնը՝ ահազանգը լռեցնելու համար:

-

Ներարկման համաձուլվածքներ
Ապրանքների կատեգորիաներ
-
Հինգ առանցքների բարձր ճշգրտության սերվո մանիպուլյատոր BRTV0...
-

Գծային արդյունաբերական ձուլման ներարկման ռոբոտ BRTR0...
-

Բարձր արագությամբ մանիպուլյատոր կաղապարի ներարկման համար BRTR0...
-

AC servo գծային արդյունաբերական մանիպուլյատոր BRTR09WD...
-

Հինգ առանցք AC servo ներարկման մանիպուլյատոր BRTR13...
-

Արագ արագությամբ դեկարտյան ռոբոտների մանիպուլյատոր BRTR17WD...
BORUNTE և BORUNTE ինտեգրատորներ
BORUNTE էկոհամակարգում BORUNTE-ն պատասխանատու է ռոբոտների և մանիպուլյատորների հետազոտության և զարգացման, արտադրության և վաճառքի համար: BORUNTE ինտեգրատորներն օգտագործում են իրենց արդյունաբերության կամ դաշտի առավելությունները՝ իրենց կողմից վաճառվող BORUNTE արտադրանքների համար տերմինալային հավելվածների ձևավորում, ինտեգրում և վաճառքից հետո սպասարկում ապահովելու համար: BORUNTE և BORUNTE ինտեգրատորները կատարում են իրենց համապատասխան պարտականությունները և միմյանցից անկախ են՝ միասին աշխատելով BORUNTE-ի պայծառ ապագան խթանելու համար:
- Հեռ.+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Չինաստան
- borunterobotcoltd@gmail.com



Սպունգային ներծծող բաժակներ, 2D տեսողական համակարգ, Առանցքային ուժի դիրքի փոխհատուցիչ, Օդաճնշական լողացող օդաճնշական spindle, Օդաճնշական լողացող էլեկտրական spindle, Ոչ մագնիսական բաժանարար,
-

vr
-

էլ
-

Հեռախոս
-

Whatsapp
-

Վերև