
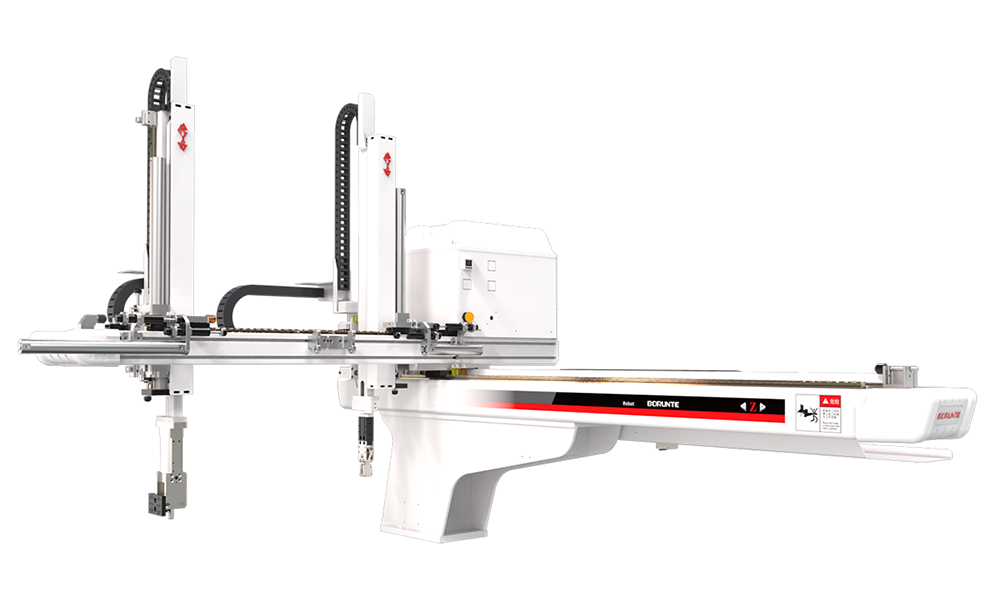



BRTB06WDS1P0/F0 անցնող ռոբոտի թեւը կիրառվում է 120T-250T հորիզոնական ներարկման մեքենաների բոլոր տեսակների համար՝ հանելու արտադրանքի և սրվակի համար: Մեկ առանցքի շարժիչի կառավարման ինտեգրված կառավարման համակարգ. ավելի քիչ ազդանշանային գծեր, միջքաղաքային հաղորդակցություն, լավ ընդլայնման կատարում, ուժեղ հակամիջամտության ունակություն, կրկնվող դիրքավորման բարձր ճշգրտություն, կարող է միաժամանակ կառավարել բազմաթիվ առանցքներ, սարքավորումների պարզ սպասարկում և ավելի քիչ խափանում: դրույքաչափը.

Ճշգրիտ դիրքավորում

Արագ

Երկար ծառայության ժամկետ

Անհաջողության ցածր մակարդակ

Կրճատել աշխատուժը

Հեռահաղորդակցություն
| Էլեկտրաէներգիայի աղբյուր (KVA) | Առաջարկվող IMM (տոննա) | Traverse Driven | EOAT-ի մոդելը |
| 1.69 | 120T-250T | AC Servo շարժիչ | Մեկ ներծծում մեկ հարմարանք |
| Թրավերս հարված (մմ) | Խաչաձև հարված (մմ) | Ուղղահայաց հարված (մմ) | Առավելագույն ծանրաբեռնվածություն (կգ) |
| 1250 թ | P:300-R:125 | 800 թ | 3 |
| Չոր հանելու ժամանակը (վրկ) | Չոր ցիկլի ժամանակը (վրկ) | Օդի սպառում (NI/ցիկլ) | Քաշը (կգ) |
| 1.7 | 6.49 | 3.5 | 198 թ |
Մոդելի ներկայացում. W: Հեռադիտակային տեսակ: D: Ապրանքի թեւ + վազող թեւ: S5. Հինգ առանցք, որը շարժվում է AC Servo Motor-ով (Traverse առանցք, Ուղղահայաց առանցք + Խաչաձև առանցք):
Վերոհիշյալ ցիկլի ժամանակը մեր ընկերության ներքին փորձարկման ստանդարտի արդյունքներն են: Մեքենայի իրական կիրառման գործընթացում դրանք կտարբերվեն ըստ իրական գործողության:

| A | B | C | D | E | F | G | H |
| 1340 թ | 2044 թ | 800 թ | 388 թ | 1250 թ | 354 | 165 | 210 |
| I | J | K | L | M | N | O | |
| 135 | 475 թ | 520 թ | 1190 թ | 225 | 520 թ | 1033 թ |
Ոչ մի լրացուցիչ ծանուցում, եթե ճշգրտումը և տեսքը փոխվել են բարելավման և այլ պատճառներով: Շնորհակալություն ըմբռնման համար։

Մեկ առանցքով սերվո մանիպուլյատոր BRTB08WDS1P0F0 Համակարգի տեղադրում
1) Հաղորդալարերի աշխատանքը պետք է կատարի պրոֆեսիոնալ էլեկտրիկը.
2) Գործողությունը սկսելուց առաջ համոզվեք, որ հոսանքն անջատված է:
3) Խնդրում ենք տեղադրել այն բոցավառվող նյութերի վրա, ինչպիսիք են մետաղը և հեռու պահել այրվող նյութերից:
4) Օգտագործելիս այն պետք է ապահով հիմնավորված լինի:
5) Եթե արտաքին էլեկտրամատակարարումը աննորմալ է, ապա կառավարման համակարգը կխափանի: Որպեսզի ամբողջ համակարգը ապահով աշխատի, համոզվեք, որ անվտանգության շղթան տեղադրեք կառավարման համակարգից դուրս: Ներարկման համաձուլվածքներ բազմակողմանի մանիպուլյատոր BORUNTE Injection molding Control System Multi-axis 269.
6) Նախքան տեղադրումը, էլեկտրահաղորդումը, շահագործումը և սպասարկումը, օպերատորը պետք է ծանոթ լինի սույն ձեռնարկի բովանդակությանը: Անհրաժեշտ է նաև լիովին հասկանալ համապատասխան մեխանիկական և էլեկտրոնային գիտելիքները և անվտանգության բոլոր նախազգուշական միջոցները:
7) Կարգավորիչի տեղադրման էլեկտրական կառավարման տուփը պետք է լինի լավ օդափոխվող, յուղակայուն և փոշուց պաշտպանված: Եթե էլեկտրական կառավարման տուփը հերմետիկ է, կարգավորիչի ջերմաստիճանը, ամենայն հավանականությամբ, չափազանց բարձր կլինի, ինչը կազդի բնականոն աշխատանքի վրա: Հետեւաբար, պետք է տեղադրվի արտանետվող օդափոխիչ: Էլեկտրական կառավարման տուփում հարմար ջերմաստիճանը 50°C-ից ցածր է: Մի օգտագործեք այն խտացրած և սառչող վայրերում:
8) Կարգավորիչը չպետք է տեղադրվի կոնտակտորին, տրանսֆորմատորին և փոփոխական հոսանքի այլ պարագաներին շատ մոտ՝ ավելորդ ալիքների միջամտությունից խուսափելու համար: Ուշադրություն. սխալ վարվելը կարող է վտանգներ առաջացնել, ներառյալ անձնական վնասվածքները կամ մեքենայի վթարները:

-
Ներարկման համաձուլվածքներ




BORUNTE և BORUNTE ինտեգրատորներ
BORUNTE էկոհամակարգում BORUNTE-ն պատասխանատու է ռոբոտների և մանիպուլյատորների հետազոտության և զարգացման, արտադրության և վաճառքի համար: BORUNTE ինտեգրատորներն օգտագործում են իրենց արդյունաբերության կամ դաշտի առավելությունները՝ իրենց կողմից վաճառվող BORUNTE արտադրանքների համար տերմինալային հավելվածների ձևավորում, ինտեգրում և վաճառքից հետո սպասարկում ապահովելու համար: BORUNTE և BORUNTE ինտեգրատորները կատարում են իրենց համապատասխան պարտականությունները և միմյանցից անկախ են՝ միասին աշխատելով BORUNTE-ի պայծառ ապագան խթանելու համար:
- Հեռ.+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Չինաստան
- borunterobotcoltd@gmail.com



Ոչ մագնիսական բաժանարար, Օդաճնշական լողացող էլեկտրական spindle, 2D տեսողական համակարգ, Օդաճնշական լողացող օդաճնշական spindle, Սպունգային ներծծող բաժակներ, Առանցքային ուժի դիրքի փոխհատուցիչ,
-

vr
-

էլ
-

Հեռախոս
-

Whatsapp
-

Վերև