



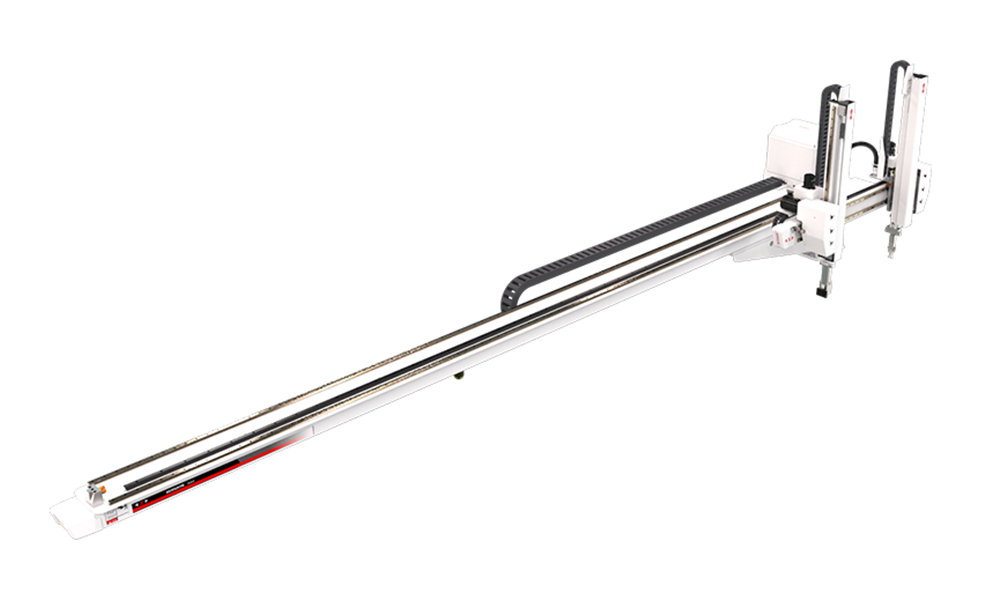
BRTV13WDS5P0/F0 seri aplike nan tout kalite seri machin piki orizontal nan 320T-700T pou pwodwi pran-soti ak sprue. Enstalasyon an diferan de robo gwo bout bwa tradisyonèl yo, pwodwi yo mete nan fen machin bòdi piki. Li gen yon bra doub. Bra vètikal la se yon etap teleskopik ak konjesyon serebral vètikal la se 1300mm. Senk-aks AC servo kondwi. Apre enstalasyon, espas enstalasyon an nan ejector a ka sove pa 30-40%, epi plant la ka itilize plis konplètman sa ki pèmèt pi bon itilizasyon espas pwodiksyon, pwodiktivite ap ogmante pa 20-30%, diminye to a ki defektye, asire ke sekirite operatè yo, redwi Mendèv ak presizyon kontwole pwodiksyon an pou diminye fatra. Senk-aks chofè ak kontwolè sistèm entegre: mwens liy siyal, kominikasyon long distans, bon pèfòmans ekspansyon, gwo kapasite anti-entèferans, gwo presizyon nan pozisyon repete, ka ansanm kontwole plizyè aks, antretyen ekipman senp, ak to echèk ki ba.

Pozisyon egzat

Vit

Long sèvis lavi

Ba Pousantaj Echèk

Diminye Travay

Telekominikasyon
| Sous pouvwa (kVA) | IMM rekòmande (tòn) | Traverse Kondwi | Modèl EOAT |
| 3.40 | 320T-700T | AC Servo motè | de aspirasyon de aparèy |
| Travèse kou (mm) | Konjesyon serebral (mm) | Kout vètikal (mm) | Max.loading (kg) |
| Orizontal vout ak yon longè total mwens pase 6 mèt | annatant | 1300 | 8 |
| Tan pou retire sèk (seg) | Tan Sik Sèch (seg) | Konsomasyon lè (NI/sik) | Pwa (kg) |
| 2.3 | annatant | 9 | Ki pa estanda |
Modèl reprezantasyon: W: kalite teleskopik. D: pwodwi bra + kourè bra. S5: Senk-aks kondwi pa AC Servo Motor (Traverse-aks、Vètikal-aks + Crosswise-aks).
Tan sik ki mansyone anwo yo se rezilta estanda tès entèn konpayi nou an. Nan pwosesis aplikasyon aktyèl la nan machin nan, yo pral varye selon operasyon aktyèl la.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | annatant | annatant | annatant | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | annatant | annatant | 253.5 | 399 | annatant | 549 | annatant |
| Q | |||||||
| 1300 | |||||||
Pa gen plis avi si spesifikasyon ak aparans yo chanje akòz amelyorasyon ak lòt rezon. Mèsi pou konpreyansyon w.

1. Chanjman Eta
Ansèyman pendant ansèyman manipilatè manipilasyon piki plastik la gen twa estati: Manyèl, Stop, ak Auto. [Manyèl]: Pou antre nan mòd Manyèl la, deplase switch eta a sou bò gòch la. [Stop]: Pou antre nan eta Stop la, deplase eta switch la nan sant la. Paramèt yo ka mete nan etap sa a. [Auto]: Pou antre nan eta Auto a, deplase eta switch la nan sant la. Otomatik ak korespondan anviwònman yo ka fèt nan kondisyon sa a.
2. Bouton Fonksyon
bouton [Kòmanse]:
Fonksyon 1: Nan mòd Auto a, peze "Kòmanse" pou kòmanse manipilatè a otomatikman.
Fonksyon 2: Nan eta a Stop, peze "Orijin" ak Lè sa a, "Kòmanse" retabli manipilatè a orijin.
Fonksyon 3: Nan eta a Stop, peze "HP" ak Lè sa a, "Kòmanse" Reyajiste orijin manipulateur a.
bouton [Stop]:
Fonksyon 1: Nan mòd Auto, peze "Stop" epi aplikasyon an ap sispann lè modil la fini. Fonksyon 2: Lè yon alèt rive, tape "Stop" nan mòd Auto a pou efase ekspozisyon alam ki rezoud.
Bouton [Orijin]: Li aplikab sèlman pou aksyon homing. Tanpri gade nan Seksyon 2.2.4 "Metòd Homing".
Bouton [HP]: Peze "HP" ak Lè sa a "Kòmanse, tout aks yo pral reset nan lòd Y1, Y2 Z, X1 ak X2, Y1 ak Y2 ap retounen nan 0, ak Z, X1 ak X2 pral retounen nan kòmansman an. pozisyon nan pwogram nan.
Bouton [Vitès Up/Down]: De bouton sa yo ka itilize pou ajiste vitès mondyal la nan eta Manyèl ak Auto.
Bouton [Emergency Stop]: Nan yon ijans, peze bouton "Emergency Stop" la ap fèmen tout aks yo epi sonnen "Emergency Stop" alèt la. Apre w fin retire bouton an, frape kle "Stop" pou fèmen alam la.

-

Piki bòdi
Kategori pwodwi yo





BORUNTE ak entegratè BORUNTE
Nan ekosistèm BORUNTE, BORUNTE responsab pou R&D, pwodiksyon, ak lavant robo ak manipulateur. Entegratè BORUNTE itilize avantaj endistri yo oswa jaden yo pou bay konsepsyon aplikasyon tèminal, entegrasyon, ak sèvis apre lavant pou pwodwi BORUNTE yo vann yo. Entegratè BORUNTE ak BORUNTE ranpli responsablite respektif yo epi yo endepandan youn ak lòt, travay ansanm pou ankouraje avni briyan BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Lachin
- borunterobotcoltd@gmail.com



Eponj ventouse, 2D sistèm vizyèl, Compensateur pozisyon fòs axial, Pneumatic k ap flote file konpwesyon, Pneumatic k ap flote elektrik filet, Splitter ki pa mayetik,
-

vr
-

imel
-

Telefòn
-

Whatsapp
-

Top