




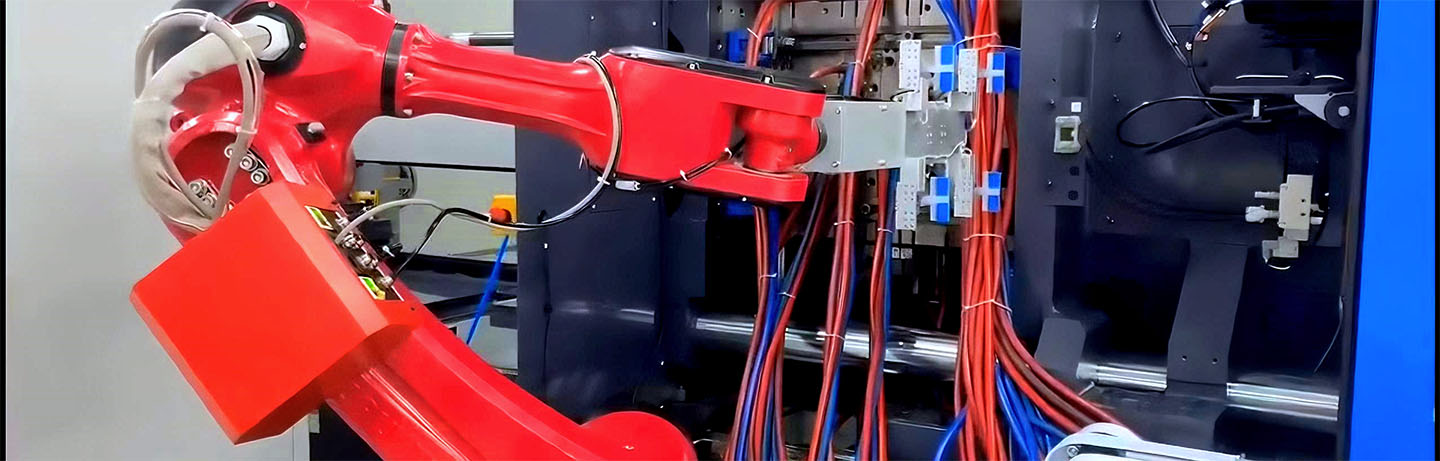
Entwodiksyon pwodwi
Seri BRTV17WSS5PC aplike nan tout kalite seri machin piki orizontal nan 600T-1300T pou pwodwi pran-soti ak sprue. Enstalasyon li diferan de bra manipulateur estanda: pwodwi yo mete nan fen machin bòdi piki, ekonomize espas enstalasyon. Kalite bra: teleskopik ak sèl bra, senk-aks AC servo kondwi, ak AC servo kondwi aks, Yon ang wotasyon aks nan 360 °, C ang wotasyon aks nan 180 °, ang aparèy ka lib pozisyone ak ajiste, lavi sèvis long, gwo presizyon, to echèk ki ba, antretyen senp, prensipalman itilize pou retire rapid oswa aplikasyon pou retire ang konplèks, patikilyèman pou pwodwi ki gen fòm long tankou otomobil, lave. machin, ak aparèy nan kay la. Senk-aks chofè ak kontwolè sistèm entegre: mwens liy siyal, kominikasyon long distans, bon pèfòmans ekspansyon, gwo kapasite anti-entèferans, segondè presizyon nan pwezante repete, epi li ka kontwole aks miltip ansanm.

Pozisyon egzat

Vit

Long sèvis lavi

Ba Pousantaj Echèk

Diminye Travay

Telekominikasyon
Paramèt debaz yo
| Sous pouvwa (KVA) | IMM rekòmande (tòn) | Traverse Kondwi | Modèl EOAT |
| 4.23 | 600T-1300T | AC Servo motè | Kataspirasyon de aparèy |
| Travèse kou (mm) | Konjesyon serebral (mm) | Kout vètikal (mm) | Max.loading (kg) |
| Travèse longè vout total:12m | ±200 | 1700 | 20 |
| Tan pou retire sèk (seg) | Tan Sik Sèch (seg) | Konsomasyon lè (NI/sik) | Pwa (kg) |
| 5.21 | annatant | 15 | Ki pa estanda |
Modèl reprezantasyon: W: Telescopic tip. S: pwodwi bra. S4: Kat-aks kondwi pa AC Servo Motor (Traverse-aks、C-aks、Vètikal-aks + Crosswise-aks)
Tan sik ki mansyone anwo yo se rezilta estanda tès entèn konpayi nou an. Nan pwosesis aplikasyon aktyèl la nan machin nan, yo pral varye selon operasyon aktyèl la.
Tablo Trajektè

| A | B | C | D | E | F | G | H | I |
| 2065 | ≤12M | 1700 | 658 | annatant | / | 174.5 | / | / |
| J | K | L | M | N1 | N2 | O | P | Q |
| 1200 | / | annatant | annatant | 200 | 200 | 1597 | / | / |
Pa gen plis avi si spesifikasyon ak aparans yo chanje akòz amelyorasyon ak lòt rezon. Mèsi pou konpreyansyon w.
Enspeksyon bra mekanik ak antretyen
1.Travay Pwosedi
Pandan itilizasyon ekipman an, kòm tan an fonksyone ogmante, pèfòmans teknik nan divès mekanis ak pati piti piti deteryore akòz divès faktè tankou friksyon, korozyon, mete, Vibration, enpak, kolizyon, ak aksidan.
2.Travay antretyen
Dapre nati travay antretyen, li ka divize an netwayaj, enspeksyon, pi sere, wilaj, ajisteman, enspeksyon, ak operasyon ekipman pou. Travay enspeksyon an fèt pa pèsonèl antretyen nan ekipman kliyan an, oswa avèk koperasyon pèsonèl teknik nou an.
(1) Netwayaj, enspeksyon ak operasyon ekipman yo jeneralman fèt pa operatè ekipman yo.
(2) Sere, ajisteman, ak operasyon lubrification yo jeneralman te pote soti nan mekanik.
(3) Travay elektrik fèt pa pèsonèl pwofesyonèl.
3. Sistèm antretyen
Sistèm antretyen ekipman faktori nou an baze sou prevansyon kòm prensip prensipal la, epi antretyen an fèt nan lè fonksyònman fiks yo. Li divize an antretyen woutin, antretyen premye nivo, antretyen dezyèm nivo, antretyen chak jou, antretyen chak mwa, ak antretyen anyèl. Klasifikasyon ak kontni travay antretyen ekipman yo baze sou chanjman nan kondisyon teknik pandan itilizasyon aktyèl la; Estrikti ekipman an; Kondisyon yo itilize; Detèmine kondisyon anviwònman yo, elatriye. Li baze sou modèl yo mete ak aje nan pati, konsantre pwojè ak degre menm jan an, kenbe ekipman an anvan mete nòmal ak aje yo pral domaje, kenbe li pwòp, idantifye ak elimine fay kache, anpeche domaj bonè nan ekipman an, ak reyalize objektif la nan kenbe operasyon nòmal nan ekipman an.
-
Piki bòdi




BORUNTE ak entegratè BORUNTE
Nan ekosistèm BORUNTE, BORUNTE responsab pou R&D, pwodiksyon, ak lavant robo ak manipulateur. Entegratè BORUNTE itilize avantaj endistri yo oswa jaden yo pou bay konsepsyon aplikasyon tèminal, entegrasyon, ak sèvis apre lavant pou pwodwi BORUNTE yo vann yo. Entegratè BORUNTE ak BORUNTE ranpli responsablite respektif yo epi yo endepandan youn ak lòt, travay ansanm pou ankouraje avni briyan BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Lachin
- borunterobotcoltd@gmail.com



Pneumatic k ap flote file konpwesyon, Eponj ventouse, Splitter ki pa mayetik, Compensateur pozisyon fòs axial, 2D sistèm vizyèl, Pneumatic k ap flote elektrik filet,
-

vr
-

imel
-

Telefòn
-

Whatsapp
-

Top