




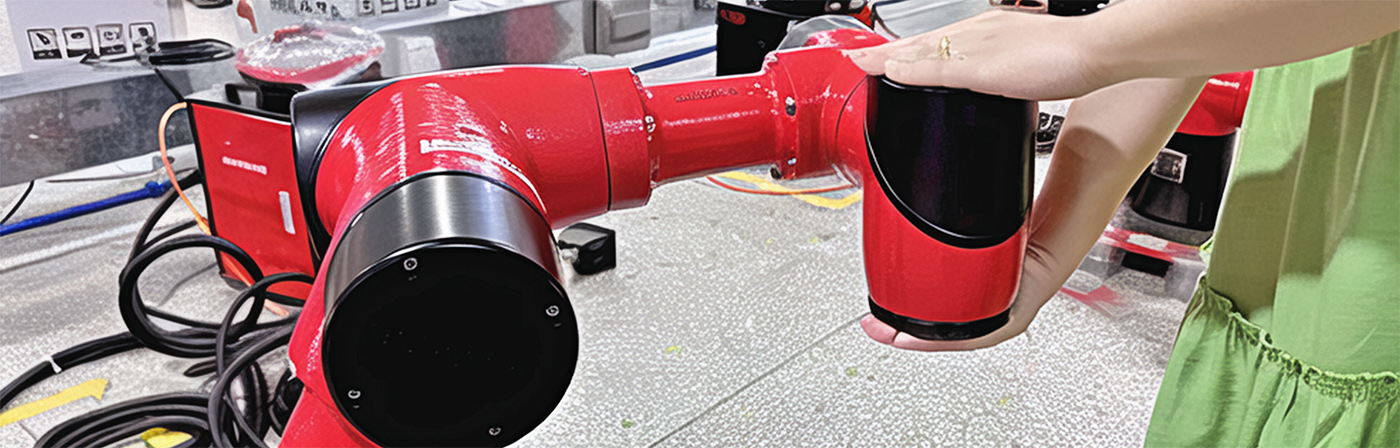
BRTIRXZ0805A se yon robo koperativ sis-aks ak fonksyon trennen-ansèyman poukont devlope pa BORUNTE. ak yon chaj maksimòm de 5kg ak yon longè maksimòm bra 930mm. Li gen fonksyon deteksyon kolizyon ak repwodiksyon tras. Li san danje epi efikas, entèlijan ak fasil yo sèvi ak, fleksib ak limyè, ekonomik ak serye, konsomasyon pouvwa ki ba ak lòt karakteristik, ki anpil satisfè bezwen yo nan koperasyon moun-machin. Segondè sansiblite li yo ak repons rapid yo ka aplike nan liy pwodiksyon fleksib segondè dansite, pou satisfè bezwen anbalaj pwodwi, bòdi piki, chaje ak dechaje, asanble ak lòt operasyon, espesyalman pou demann aplikasyon travay kolaborasyon moun-machin. Klas pwoteksyon an rive nan IP50. Pousyè-prèv ak dlo-prèv. Presizyon nan pozisyon repete se ± 0.1mm.

Pozisyon egzat

Vit

Long sèvis lavi

Ba Pousantaj Echèk

Diminye Travay

Telekominikasyon
| Atik | Range | Vitès maksimòm | ||
| Bra | J1 | ± 180° | 180°/s | |
| J2 | ± 90° | 180°/s | ||
| J3 | -70 ° ~ + 240 ° | 180°/s | ||
| Ponyèt | J4 | ± 180° | 180°/s | |
| J5 | ± 180° | 180°/s | ||
| J6 | ± 360° | 180°/s | ||
|
| ||||
| Longè bra (mm) | Kapasite chaje (kg) | Repete Pozisyon Presizyon (mm) | Sous pouvwa (kVA) | Pwa (kg) |
| 930 | 5 | ± 0.05 | 0.76 | 28 |

Karakteristik BRTIRXZ0805A
1.Kolaborasyon moun-machin pi an sekirite: bati-an segondè fyab Capteur koupl ak fonksyon deteksyon kolizyon ka avèk efikasite asire sekirite nan kolaborasyon moun-machin, san yo pa bezwen pou izolasyon kloti, anpil ekonomize espas.
2.Fasil kontwòl ak trennen ansèyman: pwogramasyon ka reyalize pa trenen trajectoire la oswa lè l sèvi avèk 3D vizyèl anrejistreman sansib nan trajectoire sib la, ki se senp epi fasil pou itilize;
3.Lightweight, pòtab, ak estrikti senp: Ki fèt ak yon estrikti ki lejè, robo a tout antye peze mwens pase 35KG epi li ekipe ak yon modil trè entegre, anpil senplifye estrikti a entèn nan kò a ak fasilite demonte ak asanble.
4.Ekonomik ak efikas: Bèl konsepsyon robo ak pri ki ba. Li gen envestisman inisyal ki ba, gwo pri-efikasite, mouvman fleksib ak lis, ak yon vitès maksimòm de 2.0m / s.
Karakteristik 5.Safety: Karakteristik sekirite avanse, tankou deteksyon kolizyon ak siveyans fòs, yo souvan entegre nan robo sa yo, asire operasyon an sekirite nan tou pre travayè imen. Sa fè yo apwopriye pou aplikasyon pou robo kolaborasyon (cobots), kote moun ak robo travay ansanm.
Kondisyon travay BRTIRXZ0805A
1, ekipman pou pouvwa: kabinè kontwòl AC: 220V±10% 50HZ/60HZ, kò DC:48V±10%
2 、 Tanperati operasyon: 0 ℃ -45 ℃ ; Tanperati bat: 15 ℃-25 ℃
3 、 imidite relatif: 20-80% RH (pa gen kondansasyon)
4, bri: ≤75dB (A)



-
Kolaborasyon machin imen
-

Piki bòdi
-

transpò
-
rasanble





BORUNTE ak entegratè BORUNTE
Nan ekosistèm BORUNTE, BORUNTE responsab pou R&D, pwodiksyon, ak lavant robo ak manipulateur. Entegratè BORUNTE itilize avantaj endistri yo oswa jaden yo pou bay konsepsyon aplikasyon tèminal, entegrasyon, ak sèvis apre lavant pou pwodwi BORUNTE yo vann yo. Entegratè BORUNTE ak BORUNTE ranpli responsablite respektif yo epi yo endepandan youn ak lòt, travay ansanm pou ankouraje avni briyan BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Lachin
- borunterobotcoltd@gmail.com



Splitter ki pa mayetik, Pneumatic k ap flote elektrik filet, 2D sistèm vizyèl, Eponj ventouse, Pneumatic k ap flote file konpwesyon, Compensateur pozisyon fòs axial,
-

vr
-

imel
-

Telefòn
-

Whatsapp
-

Top