




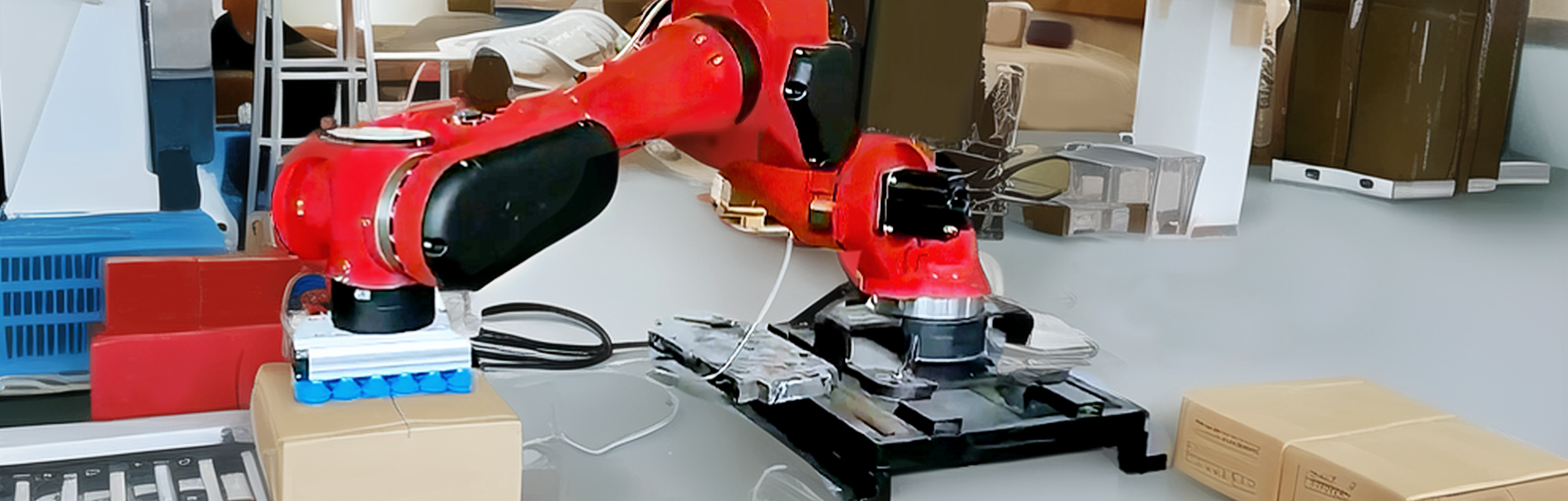
BRTIRPL1608A robo kalite se yon robo kat aks ki devlope pa BORUNTE pou asanble, klasman ak lòt senaryo aplikasyon nan materyèl limyè, ti ak gaye. Longè maksimòm bra a se 1600mm ak chaj maksimòm lan se 8KG. Klas pwoteksyon an rive nan IP40. Presizyon nan pozisyon repete se ± 0.1mm.

Pozisyon egzat

Vit

Long sèvis lavi

Ba Pousantaj Echèk

Diminye Travay

Telekominikasyon
| Atik | Range | Range | Vitès maksimòm | ||
| Mèt bra | Anwo | Sifas aliye a distans konjesyon serebral 1146mm | 38° | konjesyon serebral: 25/305/25 (mm) | |
| Hem | 98° | ||||
| Fen | J4 | ± 360° | (Chajman siklik/ritm) 0kg/150 tan/min、3kg/150tan/min、5kg/130tan/min、8kg/115tan/min | ||
| Longè bra (mm) | Kapasite chaje (kg) | Repete Pozisyon Presizyon (mm) | Sous pouvwa (kVA) | Pwa (kg) | |
| 1600 | 8 | ± 0.1 | 6.36 | 256 | |

BRTIRPL1608A se rezilta plizyè ane rechèch ak devlopman ekip enjenyè ki gen eksperyans BORUNTE a. Swiv ekspètiz yo nan robotik ak automatisation, yo te simonte divès defi teknik yo kreye yon robo ki satisfè bezwen yo ki toujou ap evolye nan endistri modèn. Pwosesis devlopman an te enplike tès solid, optimize, ak ajisteman pou asire pi wo estanda pèfòmans, fyab, ak sekirite.
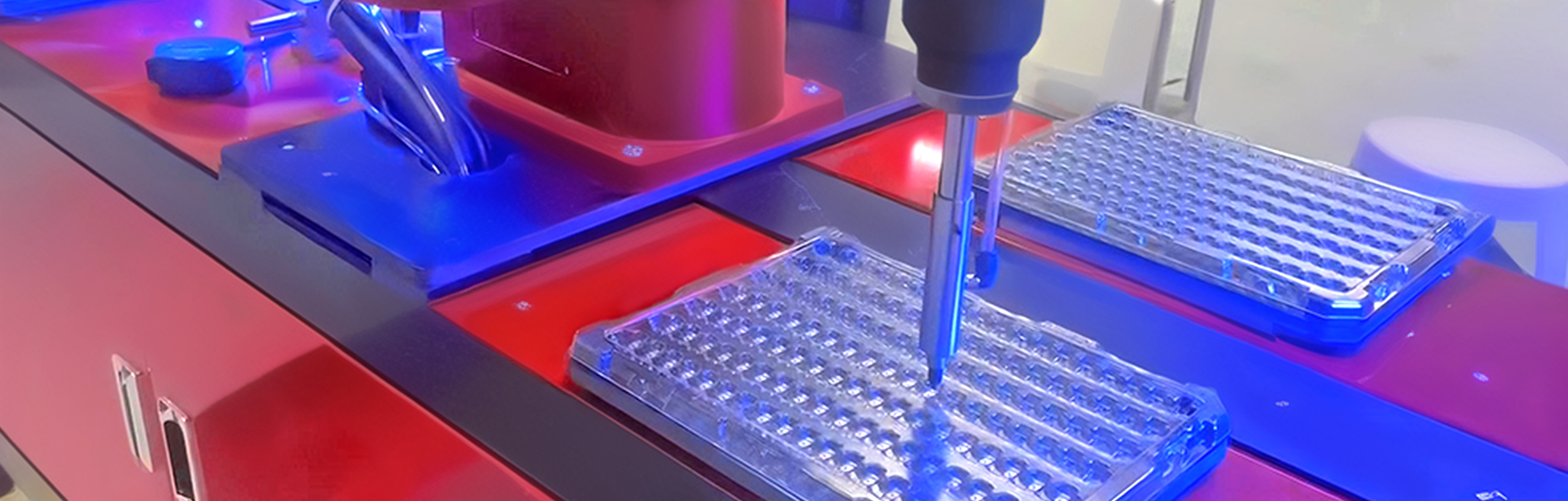
1. Chwazi-ak-Place:Kat aks Paralèl Robot la ekselan nan operasyon chwazi ak plas, avèk efikasite manyen objè ki gen diferan gwosè ak fòm. Mouvman presi li yo ak vitès rapid pèmèt rapid klasman, anpile, ak transfere nan atik, diminye travay manyèl ak amelyore pwodiktivite.
2. Asanble: Avèk presizyon segondè li yo ak adaptabilite, robo sa a se yon chwa ekselan pou travay asanble. Li ka byen okipe konpozan konplike, asire aliyman egzat ak koneksyon an sekirite. Kat aks Paralèl Robot la rasyonalize pwosesis asanble, sa ki lakòz kontwòl kalite amelyore ak redwi tan asanble.
3. Anbalaj: Vitès rapid robo a ak mouvman egzak fè li ideyal pou aplikasyon pou anbalaj. Li ka rapidman pake pwodwi yo nan bwat, kès, oswa resipyan, asire plasman ki konsistan epi minimize erè anbalaj. Kat aks Paralèl Robot la optimize efikasite anbalaj ak sipòte pwodiksyon gwo volim.
1. Kouman mwen ka entegre kat aks paralèl robo a nan liy pwodiksyon ki egziste deja mwen an?
BORUNTE bay sipò entegrasyon konplè. Ekip ekspè nou an ap travay sere sere ak ou pou konprann kondisyon ou yo ak personnaliser entegrasyon robo a pou anfòm san pwoblèm nan liy pwodiksyon ou. Kontakte ekip lavant nou an pou plis asistans.
2. Ki kapasite maksimòm chaj robo a?
Kat aks Paralèl Robot la gen yon kapasite maksimòm chaj 8kg, asire li ka okipe yon pakèt objè ak materyèl avèk efikasite.
3. Èske yo ka pwograme robo a pou fè travay konplèks?
Absoliman! Otomatik paralèl klasman endistriyèl robo vini ak kapasite pwogram avanse. Li sipòte plizyè lang pwogramasyon epi li ofri yon koòdone fasil pou itilize pou pwograme travay konplèks avèk fasilite. Ekip sipò teknik nou an disponib pou ede w nan pwogramasyon robo a pou aplikasyon espesifik ou.
Aplikasyon pou lou chaje robo anpile:
Palètize, depaletize, davwa lòd, ak lòt travay yo tout ka fèt pa robo anpile chaje lou. Yo ofri yon metòd pratik pou jere gwo chaj, epi yo ka itilize yo otomatize anpil pwosesis manyèl, bese demann pou travay imen ak ogmante pwodiktivite. Gwo chajman anpile robo yo tou souvan itilize nan pwodiksyon an nan otomobil, pwosesis la nan manje ak bwason, ak lojistik ak distribisyon.


-
Transpò
-
Klasman
-

Deteksyon
-
Vizyon





BORUNTE ak entegratè BORUNTE
Nan ekosistèm BORUNTE, BORUNTE responsab pou R&D, pwodiksyon, ak lavant robo ak manipulateur. Entegratè BORUNTE itilize avantaj endistri yo oswa jaden yo pou bay konsepsyon aplikasyon tèminal, entegrasyon, ak sèvis apre lavant pou pwodwi BORUNTE yo vann yo. Entegratè BORUNTE ak BORUNTE ranpli responsablite respektif yo epi yo endepandan youn ak lòt, travay ansanm pou ankouraje avni briyan BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Lachin
- borunterobotcoltd@gmail.com



Compensateur pozisyon fòs axial, Pneumatic k ap flote file konpwesyon, Splitter ki pa mayetik, 2D sistèm vizyèl, Eponj ventouse, Pneumatic k ap flote elektrik filet,
-

vr
-

imel
-

Telefòn
-

Whatsapp
-

Top