
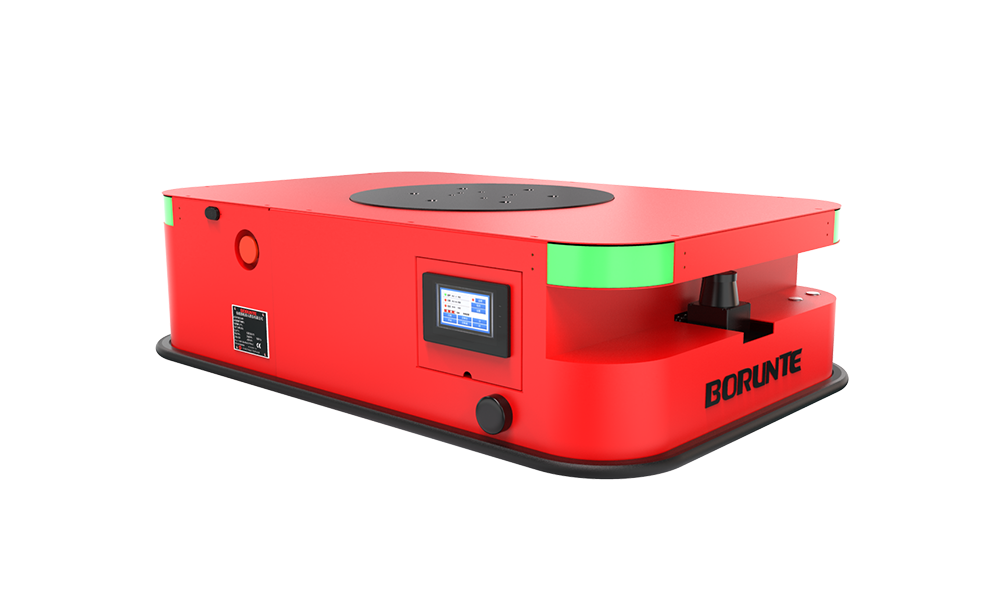



BRTAGV12010A se yon robo transpò jack-up ki kachèt ki itilize lazè SLAM ak navigasyon kòd QR, ak yon chaj 100kg. Lazè SLAM ak QR kòd navigasyon ka chanje lib pou satisfè plizyè sèn ak diferan egzijans presizyon. Nan sèn konplèks ak anpil etajè, kòd QR yo itilize pou pwezante egzak, perçage nan etajè yo pou anbalaj ak manyen. Navigasyon lazè SLAM yo itilize nan sèn fiks, ki pa limite pa kòd QR tè a epi li ka opere lib.

Pozisyon egzat

Vit

Long sèvis lavi

Ba Pousantaj Echèk

Diminye Travay

Telekominikasyon
| Mòd navigasyon | Lazè SLAM & QR navigasyon |
| Kondwi mòd | Diferans de wou |
| L*W*H | 996mm * 646mm * 269mm |
| Reyon vire | 550mm |
| Pwa | Apeprè 130 kg |
| Ratrd chaje | 100kg |
| Ground clearance | 32mm |
| Jacking plak gwosè | R = 200mm |
| Maksimòm wotè jacking | 60mm |
| Paramèt pèfòmans | |
| Trafikabilite | ≤3% pant |
| Presizyon sinematik | ± 10 mm |
| Vitès kwazyè | 1 m/s (≤1.2m/s) |
| Paramèt batri | |
| Kapasite batri | 24A·H |
| Tan kouri kontinyèl | ≥8H |
| Chaje metòd | Manyèl, oto |
| Ekipman Espesifik | |
| Lazè rada | ✓ |
|
|
|
| Bouton pou kanpe ijans | ✓ |
| Oratè | ✓ |
| Lanp atmosfè | ✓ |
| Anti-kolizyon teren | ✓ |

Sis karakteristik BRTAGV12010A:
1. Otonòm: Yon robo gid otomatik avanse ekipe ak detèktè ak sistèm navigasyon ki pèmèt li fonksyone poukont li nan kontwòl dirèk moun.
2. Fleksibilite: AGV ka fasilman navige sou wout nòmal yo kòm byen ke chanje nan lòt chemen jan sa nesesè.
3. Efikasite: AGV ka koupe depans transpò pandan y ap amelyore presizyon livrezon.
4. Sekirite: AGV yo ekipe ak aparèy pwoteksyon sekirite pou anpeche kolizyon ak pwoteje sekirite moun ak lòt machin.
5. Konsistans: AGV ka resevwa fòmasyon pou fè devwa espesifik yo toujou.
6. Batri ki mache ak pil: AGV sèvi ak teknoloji batri rechargeable, ki pèmèt yo travay pou peryòd tan ki pi long pase machin konvansyonèl yo.
Antretyen ekipman nan robo gid otomatik avanse:
1. Yo ta dwe enspekte koki a ak wou inivèsèl nan robo gid otomatik avanse yon fwa pa mwa, epi yo ta dwe tcheke lazè a yon fwa pa semèn. Chak twa mwa, etikèt sekirite yo ak bouton yo dwe pase yon tès.
2. Paske wou kondwi robo a ak wou inivèsèl yo se an poliyiretàn, yo pral kite tras sou tè a apre itilizasyon pwolonje, sa ki nesesè netwayaj woutin.
3. Kò robo a dwe sibi netwayaj woutin.
4. netwayaj lazè regilye nesesè. Robo a ka pa kapab rekonèt siy oswa etajè palèt si lazè a pa byen konsève; li kapab tou rive nan yon eta arè ijans san okenn eksplikasyon aparan.
5. AGV ki te soti nan sèvis pou yon peryòd tan pwolonje dwe estoke ak mezi anti-korozyon, etenn, ak batri a ranpli yon fwa pa mwa.
6. Yo dwe egzamine redukteur planetè diferans lan pou antretyen piki lwil oliv chak sis mwa.
7. Pou plis enfòmasyon sou antretyen ekipman, konsilte gid itilizatè a.



-

Klas depo
-
Chaje ak dechaje
-
Otomatik manyen




BORUNTE ak entegratè BORUNTE
Nan ekosistèm BORUNTE, BORUNTE responsab pou R&D, pwodiksyon, ak lavant robo ak manipulateur. Entegratè BORUNTE itilize avantaj endistri yo oswa jaden yo pou bay konsepsyon aplikasyon tèminal, entegrasyon, ak sèvis apre lavant pou pwodwi BORUNTE yo vann yo. Entegratè BORUNTE ak BORUNTE ranpli responsablite respektif yo epi yo endepandan youn ak lòt, travay ansanm pou ankouraje avni briyan BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Lachin
- borunterobotcoltd@gmail.com



Eponj ventouse, Pneumatic k ap flote elektrik filet, 2D sistèm vizyèl, Pneumatic k ap flote file konpwesyon, Compensateur pozisyon fòs axial, Splitter ki pa mayetik,
-

vr
-

imel
-

Telefòn
-

Whatsapp
-

Top