



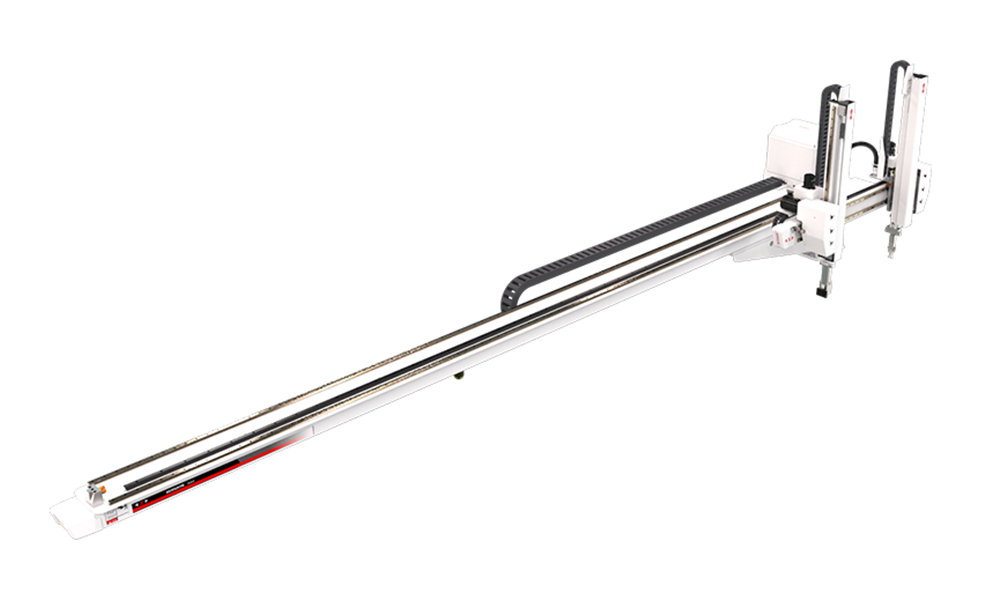
Serija BRTV13WDS5P0/F0 odnosi se na sve vrste vodoravnih strojeva za brizganje u rasponu od 320T-700T za proizvode za van i zalive. Instalacija se razlikuje od tradicionalnih robota s gredom, proizvodi se postavljaju na kraj strojeva za injekcijsko prešanje. Ima dupli krak. Vertikalna ruka je teleskopska pozornica i okomiti hod je 1300 mm. Petoosni AC servo pogon. Nakon ugradnje, prostor za ugradnju ejektora može se uštedjeti za 30-40%, a postrojenje se može potpunije koristiti što omogućuje bolju iskorištenost proizvodnog prostora, produktivnost će se povećati za 20-30%, smanjiti stopu kvarova, osigurati sigurnost operatera, smanjenje radne snage i točna kontrola izlaza kako bi se smanjio otpad. Integrirani sustav pokretača i kontrolera s pet osi: manje signalnih linija, komunikacija na velike udaljenosti, dobre performanse proširenja, jaka sposobnost sprječavanja smetnji, visoka točnost ponovljenog pozicioniranja, može istovremeno kontrolirati više osi, jednostavno održavanje opreme i niska stopa kvarova.

Precizno pozicioniranje

Brzo

Dugi vijek trajanja

Niska stopa neuspjeha

Smanjite rad

Telekomunikacije
| Izvor energije (kVA) | Preporučeni IMM (tona) | Pogon pogonjen | Model EOAT |
| 3.40 | 320T-700T | AC servo motor | dva usisavanja dva učvršćenja |
| Poprečni hod (mm) | Poprečni hod (mm) | Vertikalni hod (mm) | Max. opterećenje (kg) |
| Horizontalni luk ukupne duljine manje od 6 metara | na čekanju | 1300 | 8 |
| Vrijeme suhog vađenja (sek) | Vrijeme suhog ciklusa (sek) | Potrošnja zraka (NI/ciklus) | Težina (kg) |
| 2.3 | na čekanju | 9 | Nestandardno |
Prikaz modela: W:teleskopski tip. D: Ruka proizvoda + ruka vodilice. S5: Petosna pogonjena AC servo motorom (poprečna os、okomita os + poprečna os).
Gore spomenuto vrijeme ciklusa rezultat je internog standarda ispitivanja naše tvrtke. U stvarnom postupku primjene stroja, oni će varirati u skladu sa stvarnim radom.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | na čekanju | na čekanju | na čekanju | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | na čekanju | na čekanju | 253.5 | 399 | na čekanju | 549 | na čekanju |
| Q | |||||||
| 1300 | |||||||
Nema daljnjih obavijesti ako se specifikacija i izgled promijene zbog poboljšanja ili drugih razloga. Hvala vam na razumijevanju.

1. Prekidač stanja
Privjesak za podučavanje ruke manipulatora za brizganje plastike ima tri statusa: ručno, zaustavljanje i automatski. [Ručno]: Za ulazak u ručni način rada, pomaknite prekidač stanja ulijevo. [Stop]: Za ulazak u stanje Stop, pomaknite prekidač stanja u sredinu. Parametri se mogu postaviti u ovoj fazi. [Auto]: Za ulazak u automatsko stanje, pomaknite prekidač stanja u sredinu. Automatske i odgovarajuće postavke mogu se izvesti u ovom stanju.
2. Funkcijski gumbi
Gumb [Start]:
Funkcija 1: U automatskom načinu rada pritisnite "Start" za automatsko pokretanje manipulatora.
Funkcija 2: U stanju Stop pritisnite "Origin", a zatim "Start" za vraćanje manipulatora na ishodište.
Funkcija 3: U stanju zaustavljanja, pritisnite "HP", a zatim "Start" za resetiranje ishodišta manipulatora.
Gumb [Stop]:
Funkcija 1: U automatskom načinu rada pritisnite "Stop" i aplikacija će se zaustaviti kada modul završi. Funkcija 2: Kada se pojavi upozorenje, dodirnite "Stop" u automatskom načinu rada za brisanje razriješenog prikaza alarma.
Gumb [Porijeklo]: Primjenjiv je samo na radnje navođenja. Molimo pogledajte odjeljak 2.2.4 "Metoda navođenja".
Gumb [HP]: Pritisnite "HP", a zatim "Start", sve će se osi resetirati redoslijedom Y1, Y2 Z, X1 i X2, Y1 i Y2 će se vratiti na 0, a Z, X1 i X2 će se vratiti na početak položaj programa.
Gumb [Speed Up/Down]: Ova dva gumba mogu se koristiti za podešavanje globalne brzine u ručnom i automatskom stanju.
Gumb [Emergency Stop]: U slučaju nužde, pritiskom na gumb "Emergency Stop" isključit će se sve osi i oglasiti se upozorenje "Emergency Stop". Nakon uklanjanja gumba pritisnite tipku "Stop" kako biste utišali alarm.

-

Injekcijsko prešanje
Kategorije proizvoda
-
Petosni servo manipulator visoke točnosti BRTV0...
-

Robot za linearno industrijsko prešanje BRTR0...
-

Manipulator velike brzine za ubrizgavanje kalupa BRTR0...
-

AC servo linearni industrijski manipulator BRTR09WD...
-

Petoosni AC servo manipulator za ubrizgavanje BRTR13...
-

Kartezijanski robot manipulator velike brzine BRTR17WD...
BORUNTE i BORUNTE integratori
U ekosustavu BORUNTE, BORUNTE je odgovoran za istraživanje i razvoj, proizvodnju i prodaju robota i manipulatora. BORUNTE integratori koriste svoju industriju ili prednost na terenu kako bi pružili dizajn terminalnih aplikacija, integraciju i usluge nakon prodaje za BORUNTE proizvode koje prodaju. BORUNTE i BORUNTE integratori ispunjavaju svoje odgovornosti i neovisni su jedni o drugima, radeći zajedno na promicanju svijetle budućnosti BORUNTE-a.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Kina
- borunterobotcoltd@gmail.com



Spužvaste usisne čašice, 2D vizualni sustav, Kompenzator položaja aksijalne sile, Pneumatsko plutajuće pneumatsko vreteno, Pneumatsko plutajuće električno vreteno, Nemagnetski razdjelnik,
-

vr
-

elektronička pošta
-

Telefon
-

Whatsapp
-

Vrh