



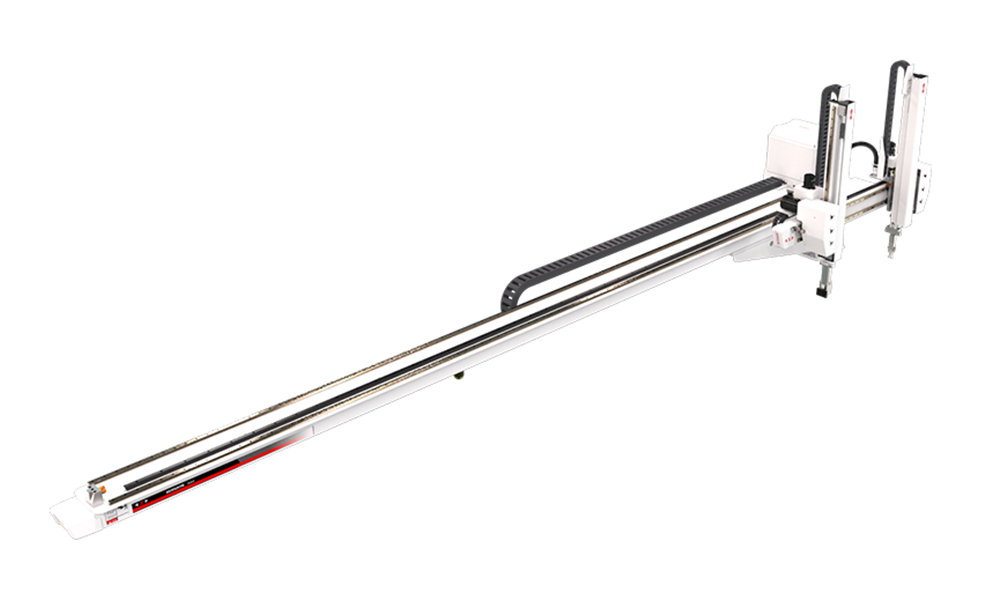
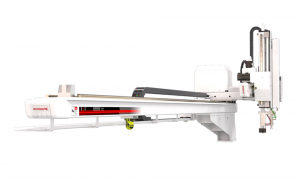
Hoʻopili ʻia ka moʻo BRTV13WDS5P0/F0 i nā ʻano ʻano mīkini hoʻoheheʻe ākea o 320T-700T no nā huahana lawe-waho a me ka sprue. ʻOkoʻa ka hoʻonohonoho ʻana mai nā robots beam kuʻuna, waiho ʻia nā huahana ma ka hope o nā mīkini hoʻoheheʻe injection. He lima pālua kona. ʻO ka lima kuʻekuʻe he pae telescopic a ʻo 1300mm ka hahau kū pololei. ʻElima-axis AC servo drive. Ma hope o ka hoʻokomo ʻana, hiki ke mālama ʻia ka wahi hoʻokomo o ka ejector e 30-40%, a hiki ke hoʻohana ʻia ka mea kanu e ʻae i ka hoʻohana maikaʻi ʻana o ka wahi hana, e hoʻonui ʻia ka huahana e 20-30%, e hōʻemi i ka helu hemahema, e hōʻoia i ka palekana o nā mea hoʻohana, hoʻemi i ka mana kanaka a hoʻomalu pono i ka hoʻopuka e hōʻemi i ka ʻōpala. ʻO ka mea hoʻokele lima axis a me ka mea hoʻokele i hoʻohui pū ʻia: nā laina hōʻailona liʻiliʻi, kamaʻilio lōʻihi, hana hoʻonui maikaʻi, ikaika anti-interference hiki, kiʻekiʻe kiʻekiʻe o ka hoʻonohonoho hou ʻana, hiki ke hoʻomalu i nā koʻi he nui, mālama pono pono, a me ka helu haʻahaʻa haʻahaʻa.

Hoʻonohonoho pololei

wikiwiki

Ola Hana lōʻihi

Haʻahaʻa hāʻule haʻahaʻa

E hoemi i ka hana

Ke kelepona
| Punawai mana (kVA) | Manaʻo ʻia IMM (toni) | Holoi ʻia | Hoʻohālike o EOAT |
| 3.40 | 320T-700T | AC Servo motor | ʻelua hoʻoheheʻe ʻelua mea paʻa |
| Kaʻaahi ʻauʻau (mm) | ʻO ka ʻāʻī kea (mm) | Paʻi kū pololei (mm) | Ka hoʻouka ʻana (kg) |
| Horizontal arch me ka lōʻihi o lalo o 6 mika | e kali ana | 1300 | 8 |
| Ka manawa lawe maloo (sec) | Ka Wā Kaʻa Māloʻo (sec) | Hoʻohana ea (NI/pōkole) | Kaumaha (kg) |
| 2.3 | e kali ana | 9 | Kūlana ʻole |
Hōʻike hoʻohālike: W: ʻAno Telescopic. D: lima huahana + lima holo. S5: ʻElima-axis i alakaʻi ʻia e AC Servo Motor (Traverse-axis, Vertical-axis + Crosswise-axis).
ʻO ka manawa pōʻaiapili i ʻōlelo ʻia ma luna nei nā hopena o ka maʻamau hoʻāʻo kūloko o kā mākou hui. Ma ke kaʻina hana noi maoli o ka mīkini, e ʻokoʻa lākou e like me ka hana maoli.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | e kali ana | e kali ana | e kali ana | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | e kali ana | e kali ana | 253.5 | 399 | e kali ana | 549 | e kali ana |
| Q | |||||||
| 1300 | |||||||
ʻAʻohe hoʻolaha hou inā hoʻololi ʻia ka kikoʻī a me ke ʻano ma muli o ka hoʻomaikaʻi ʻana a me nā kumu ʻē aʻe. Mahalo iā ʻoe no kou hoʻomaopopo ʻana.

1. Hoololi Moku'āina
ʻO ka pendant aʻoaʻo lima o ka plastic injection molding manipulator arm he ʻekolu kūlana: Manual, Stop, a me Auto. [Manual]: No ke komo ʻana i ke ʻano manual, e hoʻoneʻe i ka hoʻololi mokuʻāina i ka hema. [Stop]: No ke komo ʻana i ka mokuʻāina Stop, e hoʻoneʻe i ka hoʻololi mokuʻāina i ke kikowaena. Hiki ke hoʻonohonoho ʻia nā ʻāpana i kēia pae. [Auto]: No ke komo ʻana i ka mokuʻāina Auto, e hoʻoneʻe i ka hoʻololi mokuʻāina i ke kikowaena. Hiki ke hana ʻia nā hoʻonohonoho ʻokoʻa a pili i kēia kūlana.
2. Nā pihi hana
pihi [hoʻomaka]:
Hana 1: Ma ke ʻano Auto, e kaomi i ka "Start" e hoʻomaka maʻalahi i ka manipulator.
Hana 2: Ma ka moku'āina Stop, kaomi "Origin" a laila "Start" e hoʻihoʻi i ka manipulator i ke kumu.
Hana 3: Ma ka moku'āina Stop, e kaomi "HP" a laila "Start" e ho'iho'i hou i ke kumu o ka manipulator.
pihi [Stop]:
Hana 1: Ma ke ʻano Auto, kaomi "Stop" a pau ka noi i ka pau ʻana o ka module. Hana 2: Ke puka mai kahi makaʻala, e kaomi i ka "Stop" ma ke ʻano Auto no ka holoi ʻana i ka hōʻike alarm i hoʻoholo ʻia.
Pihi [Origin]: Pili wale ia i nā hana homing. E ʻoluʻolu e nānā i ka Pauku 2.2.4 "Homing Method".
Pihi [HP]: E kaomi i ka "HP" a laila "E hoʻomaka, e hoʻihoʻi hou nā koʻi āpau ma ke ʻano o Y1, Y2 Z, X1 a me X2, Y1 a me Y2 e hoʻi i 0, a e hoʻi hou ʻo Z, X1 a me X2 i ka hoʻomaka. kūlana o ka papahana.
Pihi [Speed Up/Down]: Hiki ke hoʻohana ʻia kēia mau pihi ʻelua no ka hoʻoponopono ʻana i ka wikiwiki honua ma Manual a me Auto state.
Pākuʻi [Emergency Stop]: I ka wā pilikia, ke kaomi ʻana i ke pihi "Emergency Stop" e hoʻopau i nā koʻi a pau a kani ka "Emergency Stop". Ma hope o ka wehe ʻana i ka puʻupuʻu, paʻi i ke kī "Stop" e hoʻopaʻa i ka alarm.

-

Hoʻoheheʻe ʻia
Māhele huahana
-
Elima axis kiʻekiʻe pololei servo Manipulator BRTV0...
-

Linear ʻoihana hoʻoheheʻe ʻia ʻana i ka lopako BRTR0...
-

Kiʻekiʻe wikiwiki manipulator no mold injection BRTR0...
-

ʻO AC servo linear manipulator ʻoihana BRTR09WD...
-

ʻElima axis AC servo injection manipulator BRTR13...
-

ʻO ka wikiwiki Cartesian Robot Manipulator BRTR17WD...
Nā mea hoʻohui BORUNTE a me BORUNTE
I loko o ka kaiaola BORUNTE, BORUNTE ke kuleana no ka R&D, ka hana ʻana, a me ke kūʻai ʻana o nā robots a me nā manipulators. Hoʻohana nā mea hoʻohui BORUNTE i kā lākou ʻoihana a i ʻole nā pono e hoʻolako i ka hoʻolālā noi terminal, hoʻohui, a me ka lawelawe ma hope o ke kūʻai aku no nā huahana BORUNTE a lākou e kūʻai aku ai. Hoʻokō nā mea hoʻohui BORUNTE a me BORUNTE i kā lākou kuleana a kūʻokoʻa kekahi i kekahi, e hana pū ana e hāpai i ka wā e hiki mai ana o BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Kina
- borunterobotcoltd@gmail.com



ʻO nā kīʻaha hoʻoheheʻe puna, ʻōnaehana ʻike 2D, ʻAxial force position compensator, Pneumatic lana pneumatic spindle, Pneumatic lana milo uila, Mea hoʻokaʻawale magnetic ʻole,
-

vr
-

leka uila
-

Kelepona
-

Whatsapp
-

ʻO luna