
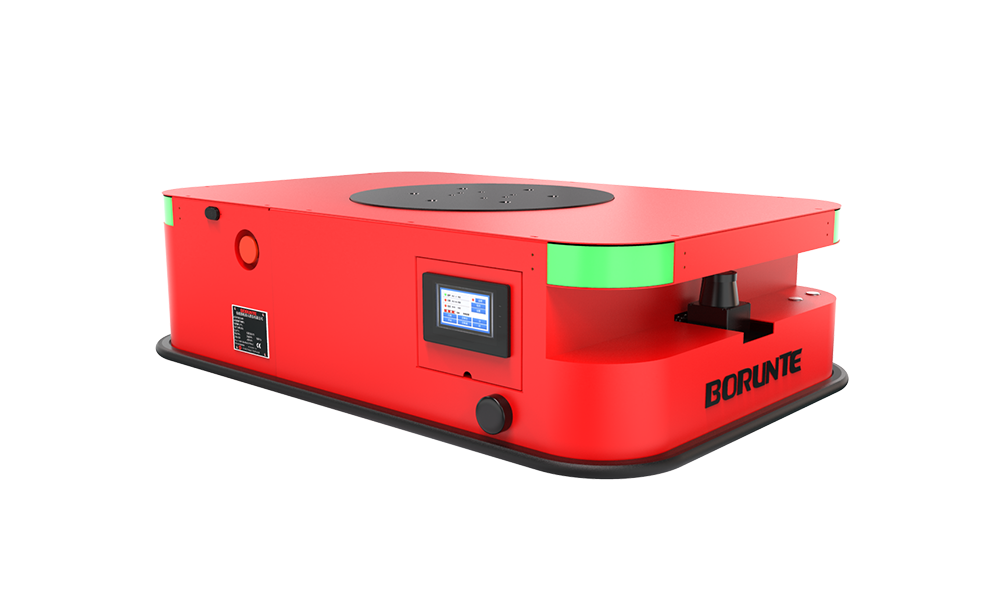



BRTAGV12010A એ 100kg લોડ સાથે QR કોડ નેવિગેશન સાથે લેસર SLAM નો ઉપયોગ કરીને છૂપો જેક-અપ ટ્રાન્સપોર્ટ રોબોટ છે. લેસર SLAM અને QR કોડ નેવિગેશનને બહુવિધ દ્રશ્યો અને વિવિધ ચોકસાઈની આવશ્યકતાઓને પૂર્ણ કરવા માટે મુક્તપણે સ્વિચ કરી શકાય છે. ઘણા છાજલીઓ સાથેના જટિલ દ્રશ્યોમાં, QR કોડનો ઉપયોગ ચોક્કસ સ્થિતિ માટે, પેકિંગ અને હેન્ડલિંગ માટે છાજલીઓમાં ડ્રિલિંગ માટે થાય છે. લેસર SLAM નેવિગેશનનો ઉપયોગ નિશ્ચિત દ્રશ્યોમાં થાય છે, જે ગ્રાઉન્ડ QR કોડ દ્વારા મર્યાદિત નથી અને મુક્તપણે કાર્ય કરી શકે છે.

ચોક્કસ સ્થિતિ

ઝડપી

લાંબી સેવા જીવન

ઓછી નિષ્ફળતા દર

શ્રમ ઘટાડો

ટેલિકોમ્યુનિકેશન
| નેવિગેશન મોડ | લેસર SLAM અને QR નેવિગેશન |
| સંચાલિત મોડ | ટુ વ્હીલ વિભેદક |
| L*W*H | 996mm*646mm*269mm |
| ટર્નિંગ ત્રિજ્યા | 550 મીમી |
| વજન | લગભગ 130 કિગ્રા |
| Ratrd લોડિંગ | 100 કિગ્રા |
| ગ્રાઉન્ડ ક્લિયરન્સ | 32 મીમી |
| જેકિંગ પ્લેટનું કદ | R=200mm |
| મહત્તમ જેકીંગ ઊંચાઈ | 60 મીમી |
| પ્રદર્શન પરિમાણો | |
| વાહનવ્યવહારક્ષમતા | ≤3% ઢાળ |
| કાઇનેમેટિક ચોકસાઈ | ±10 મીમી |
| ક્રૂઝ ઝડપ | 1 m/s (≤1.2m/s) |
| બેટરી પરિમાણો | |
| બેટરી ક્ષમતા | 24A·H |
| સતત ચાલવાનો સમય | ≥8H |
| ચાર્જિંગ પદ્ધતિ | મેન્યુઅલ, ઓટો |
| ચોક્કસ સાધનો | |
| લેસર રડાર | ✓ |
|
|
|
| ઇમરજન્સી સ્ટોપ બટન | ✓ |
| વક્તા | ✓ |
| વાતાવરણનો દીવો | ✓ |
| અથડામણ વિરોધી પટ્ટી | ✓ |

BRTAGV12010A ની છ વિશેષતાઓ:
1. સ્વાયત્ત: અદ્યતન સ્વચાલિત માર્ગદર્શિકા રોબોટ સેન્સર્સ અને નેવિગેશન સિસ્ટમ્સથી સજ્જ છે જે તેને સીધા માનવ નિયંત્રણથી સ્વતંત્ર રીતે કાર્ય કરવાની મંજૂરી આપે છે.
2. સુગમતા: AGV સામાન્ય રસ્તાઓ પર સરળતાથી નેવિગેટ કરી શકે છે તેમજ જરૂરિયાત મુજબ અન્ય રસ્તાઓ પર સ્વિચ કરી શકે છે.
3. કાર્યક્ષમતા: AGV પરિવહન ખર્ચમાં ઘટાડો કરી શકે છે જ્યારે ડિલિવરીની ચોકસાઈમાં પણ સુધારો કરી શકે છે.
4. સલામતી: AGV અથડામણ અટકાવવા અને મનુષ્યો અને અન્ય મશીનોની સલામતી માટે સલામતી સુરક્ષા ઉપકરણોથી સજ્જ છે.
5. સુસંગતતા: એજીવીને નિર્દિષ્ટ ફરજો સતત કરવા માટે તાલીમ આપવામાં આવી શકે છે.
6. બેટરી સંચાલિત: AGV રિચાર્જ કરી શકાય તેવી બેટરી ટેક્નોલોજીનો ઉપયોગ કરે છે, જે તેમને પરંપરાગત મશીનો કરતાં લાંબા સમય સુધી કામ કરવાની મંજૂરી આપે છે.
અદ્યતન સ્વચાલિત માર્ગદર્શિકા રોબોટનું સાધન જાળવણી:
1. અદ્યતન સ્વચાલિત માર્ગદર્શિકા રોબોટના શેલ અને યુનિવર્સલ વ્હીલનું મહિનામાં એકવાર નિરીક્ષણ કરવું જોઈએ, અને લેસરને અઠવાડિયામાં એકવાર તપાસવું જોઈએ. દર ત્રણ મહિને, સુરક્ષા લેબલ્સ અને બટનોએ એક પરીક્ષણ પાસ કરવું આવશ્યક છે.
2. કારણ કે રોબોટનું ડ્રાઇવિંગ વ્હીલ અને યુનિવર્સલ વ્હીલ પોલીયુરેથીન છે, તેઓ લાંબા સમય સુધી ઉપયોગ કર્યા પછી જમીન પર નિશાન છોડશે, નિયમિત સફાઈની જરૂર પડશે.
3. રોબોટ બોડીની નિયમિત સફાઈ થવી જોઈએ.
4. નિયમિત લેસર સફાઈ જરૂરી છે. જો લેસર યોગ્ય રીતે જાળવવામાં ન આવે તો રોબોટ ચિહ્નો અથવા પેલેટ છાજલીઓને ઓળખવામાં અસમર્થ હોઈ શકે છે; તે સ્પષ્ટ સમજૂતી વિના કટોકટી બંધ સ્થિતિમાં પણ પહોંચી શકે છે.
5. AGV કે જે લાંબા સમય સુધી સેવાની બહાર છે તેને કાટરોધક પગલાં સાથે સંગ્રહિત કરવું જોઈએ, બંધ કરવું જોઈએ અને મહિનામાં એકવાર બેટરી રિફિલ કરવી જોઈએ.
6. વિભેદક ગિયર પ્લેનેટરી રીડ્યુસરની દર છ મહિને ઓઇલ ઇન્જેક્શન જાળવણી માટે તપાસ કરવી આવશ્યક છે.
7. સાધનોની જાળવણી પર વધુ માહિતી માટે, વપરાશકર્તા માર્ગદર્શિકાનો સંપર્ક કરો.



-

વેરહાઉસ સોર્ટિંગ
-
લોડિંગ અને અનલોડિંગ
-
આપોઆપ હેન્ડલિંગ




BORUNTE અને BORUNTE ઈન્ટિગ્રેટર્સ
BORUNTE ઇકોસિસ્ટમમાં, BORUNTE રોબોટ્સ અને મેનિપ્યુલેટરના R&D, ઉત્પાદન અને વેચાણ માટે જવાબદાર છે. BORUNTE ઇન્ટિગ્રેટર્સ તેમના ઉદ્યોગ અથવા ક્ષેત્રના ફાયદાઓનો ઉપયોગ તેઓ વેચતા BORUNTE ઉત્પાદનો માટે ટર્મિનલ એપ્લિકેશન ડિઝાઇન, એકીકરણ અને વેચાણ પછીની સેવા પ્રદાન કરવા માટે કરે છે. BORUNTE અને BORUNTE સંકલનકર્તાઓ તેમની સંબંધિત જવાબદારીઓને પૂર્ણ કરે છે અને એકબીજાથી સ્વતંત્ર છે, BORUNTE ના ઉજ્જવળ ભવિષ્યને પ્રોત્સાહન આપવા માટે સાથે મળીને કામ કરે છે.
- ટેલિફોન:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



સ્પોન્જ સક્શન કપ, ન્યુમેટિક ફ્લોટિંગ ઇલેક્ટ્રિક સ્પિન્ડલ, 2D વિઝ્યુઅલ સિસ્ટમ, વાયુયુક્ત ફ્લોટિંગ ન્યુમેટિક સ્પિન્ડલ, અક્ષીય બળ સ્થિતિ વળતર આપનાર, નોન મેગ્નેટિક સ્પ્લિટર,
-

vr
-

ઇમેઇલ
-

ફોન
-

વોટ્સએપ
-

ટોચ